I riassunti , gli appunti i testi contenuti nel nostro sito sono messi a disposizione gratuitamente con finalità illustrative didattiche, scientifiche, a carattere sociale, civile e culturale a tutti i possibili interessati secondo il concetto del fair use e con l' obiettivo del rispetto della direttiva europea 2001/29/CE e dell' art. 70 della legge 633/1941 sul diritto d'autore
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
3.1 Definizione di macchina
Si definisce macchina un insieme di più elementi materiali che prendono il nome di membri ad organi della macchina.
Alcuni organi sono fissi altri mobili; quelli mobili si muovono sotto l’azioni di forze di natura diversa producendo lavoro.
In una macchina di qualunque tipo essa sia, ha sede una trasformazione energetica.
Ad esempio: un motore a combustione interna (motore ad accensione comandata, motore diesel, turbina a gas) è una macchina termica nella quale l’energia termica generata dalla combustione viene trasformata in lavoro meccanico; un motore elettrico è una macchina elettrica nella quale l’energia elettrica viene trasformata in lavoro meccanico.
Nei due esempi appena riportati entrambe le macchine producono lavoro meccanico e per questo motivo si dicono macchine motrici.
Esistono poi macchine che trasformano l’energia meccanica in altri tipi di energia; ad esempio i compressori e le pompe assorbono energia meccanica per aumentare la pressione di un fluido, dinamo ed alternatori trasformano l’energia meccanica in energia elettrica. Tutte le macchine di questo tipo sono dette macchine generatrici.
Vi sono infine macchine nelle quali l’energia meccanica viene utilizzata per compiere un operazione come ad esempio nelle macchine utensili (tornio, fresatrice, ecc.) nelle macchine agricole, nelle macchine dei più diversi cicli di produzione industriale; le macchine di questo tipo sono dette macchine operatrici.
3.2 Definizione di meccanismo
Sono detti meccanismi quei sistemi meccanici che realizzano la trasmissione del moto tra due organi di una macchina o tra due macchine.
Nei meccanismi non vi è quindi alcuna trasformazione energetica ma, soltanto, un trasferimento di moto e di potenza meccanica.
Un esempio di meccanismo è rappresentato dalla trasmissione con cinghia schematicamente rappresentata in fig.3.1 .
Essa è costituita essenzialmente da due ruote, dette pulegge, montate su due alberi i cui assi geometrici hanno traccia O1 ed O2 nella figura. Le posizioni di O1 ed O2 sono fisse per la presenza della struttura rigida detta telaio.
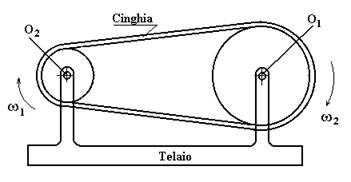
Fig.3.1
Sulle due pulegge è avvolta un organo flessibile, detto comunemente cinghia; quest’ultimo, per l’attrito tra la sua superficie interna è la superficie esterna delle pulegge, trasferisce il moto e la potenza meccanica da una puleggia all’altra.
In fig.3.2 è riportato uno schema del meccanismo detto manovellismo di spinta rotativa che trasforma un moto alternativo in un moto rotatorio o viceversa.

Fig.3.2
Tale meccanismo è essenzialmente costituito da una manovella (AB) che ruota attorno ad un asse di traccia A in figura, alla quale è collegata una biella (CB) tramite un giunto che consente una rotazione relativa attorno ad un asse di traccia B; la biella è infine collegata al cursore (il pistone) che scorre in una guida (il cilindro), tramite un giunto che consente una rotazione relativa tra biella e cursore attorno ad un asse di traccia C.
3.2.1 Gradi di libertà
In un qualunque sistema meccanico, il numero di gradi di libertà è definito come il numero di coordinate indipendenti necessarie ad individuare in ogni istante la posizione di tutti gli elementi che lo compongono. Tali coordinate prendono il nome di coordinate lagrangiane.
La maggior parte delle macchine e dei meccanismi, nelle ipotesi che gli elementi siano rigidi e che non vi siano giochi, hanno un solo grado di libertà.
3.2.2 Coppie cinematiche
Come si può osservare dagli esempi di meccanismi riportati nel paragrafo precedente, due elementi contigui sono collegati tra di loro in modo da rendere possibile il moto relativo. Ciascuna coppia di elementi così collegati prende il nome di coppia cinematica.
Le coppie cinematiche si distinguono in:
Coppie cinematiche indipendenti: il moto relativo tra i due elementi è un moto ad 1 solo grado di libertà. Esempi di coppie cinematiche indipendenti sono quelle tra biella e manovella e tra manovella e cursore.
Coppie cinematiche dipendenti: il moto relativo è ad 1 solo grado di libertà perché la presenza di altre coppie cinematiche impedisce altri gradi di libertà. Un esempio è rappresentato dalla coppia cursore-guida: se entrambi i componenti sono cilindrici, oltre al moto traslatorio lungo l’asse della guida, sarebbe consentita anche la rotazione del cursore attorno all’asse della guida stessa; quest’ultimo moto è però impedito dalla presenza delle altre coppie cinematiche.
Coppie cinematiche di forza: il moto relativo è definito dalla presenza di forze che assicurano il contatto tra gli elementi della coppia. Ad esempio nella coppia ruota-rotaia il moto relativo tra i due elementi è ad 1 grado di libertà per la presenza della forza di chiusura tra i due elementi.
Dal punto di vista degli elementi cinematica, le coppie cinematiche si distinguono in coppie elementari o inferiori e coppie superiori.
Le coppie cinematiche elementari sono costituite da due elementi rigidi aventi superfici di contatto identiche e combacianti; a seconda del moto relativo tra i due elementi possono essere:
C.C. Prismatica: il moto relativo è traslatorio.
C.C. Rotoidale: il moto relativo è rotatorio.
C.C. Elicoidale: il moto relativo è elicoidale, cioè consiste in una rotazione attorno ad un asse ed una traslazione lungo lo stesso asse.
Tutte le altre possibili coppie cinematiche sono superiori; esse possono essere:
Per studiare il comportamento dinamico di un sistema è conveniente sostituire al sistema stesso (a massa distribuita) un sistema più semplice costituito da masse puntiformi rigidamente interconnesse. I due sistemi sono equivalenti a tutti gli effetti se, sottoposti allo stesso sistema di forze, si muovono con la stessa legge del moto.
Fig.3.3
Sia S un corpo rigido di massa M e sia G il suo baricentro; ad esso si vuol sostituire un sistema di masse puntiformi rigidamente interconnesse, non necessariamente appartenenti allo spazio occupato da S, tali che esse costituiscano un sistema equivalente ad S.
Mediante le equazioni cardinali della dinamica si dimostra che:
1) I due sistemi debbono avere la stessa massa. Da ciò si ricava una prima relazione:
![]() (3.1)
(3.1)
2) I baricentri dei due sistemi debbono coincidere. Tale condizione implica che la somma dei momenti statici di tutte le masse puntiformi rispetto ad una terna baricentrica Gxyz debba essere nulla. Si ricavano altre tre relazioni:
![]() (3.2)
(3.2)
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
3) Le matrici di inerzia dei due sistemi devono essere uguali. Si ricavano così tre relazioni per i momenti di inerzia di massa:
![]() (3.5)
(3.5)
![]() (3.6)
(3.6)
![]() (3.7)
(3.7)
e tre relazioni per i prodotti di inerzia:
![]() (3.8)
(3.8)
![]() (3.9)
(3.9)
![]() (3.10)
(3.10)
Si ottengono quindi 10 relazioni, con le quali, fissate 10 posizioni, si possono ricavare i 10 valori delle masse che costituiscono un sistema equivalente al corpo S.
Se viene scelta una terna centrale di inerzia e le masse vengono disposte sugli assi, risulteranno nulli i prodotti di inerzia sia di S che del sistema di masse puntiformi. In questo caso quindi le relazioni da soddisfare saranno soltanto le prime 7 e saranno sufficienti sette masse, una delle quali disposta nel baricentro (V. fig.3.4)
Fig.3.4
Una ulteriore semplificazione si raggiunge se si scelgono le masse disposte sullo stesso asse uguali tra di loro e poste a distanze uguali dal baricentro. In questo caso la posizione del baricentro del sistema di masse puntiformi coincide evidentemente con G e quindi le equazioni (II), (III) e (IV) sono identicamente soddisfatte. Rimangono quindi solo 4 relazioni, con le quali ricavare 3 valori delle masse e 3 distanze (V.fig.3.5)
Fig.3.5
Si può allora procedere in due modi:
m1 = m2 = m3 = M/6
e quindi la (I) è soddisfatta. Restano quindi 3 relazioni con le quali si ricavano le 3 distanze.
dx = dy = dz = d
e si ricavano, dalle 4 equazioni, le 4 incognite: m1; m2; m3 e d.
3.3.1 Moto piano
Nel caso il moto di S sia un moto piano, un sistema dinamicamente equivalente ad S, per tale moto, può esser ottenuto con due sole masse.
Si consideri un corpo S che si muove in un piano parallelo al piano x h di un riferimento fisso ed un riferimento Gxyz solidale ad S avente gli assi paralleli ad Wxhz. (v. fig.3.6) Il moto di S consiste dunque in una traslazione nel piano x h ed in una rotazione attorno a z. Per tale motivo, un sistema di due masse puntiformi m1 ed m2 disposte sull’asse x sarà dinamicamente equivalente ad S se:
Fig.3.6
Le tre condizioni su elencate sono espresse dalle relazioni:
M = m1 + m2 (3.1’)
m1 x1 = m2 x2 (3.2’)
m1 x12 + m2 x22 = Izz = m r2 (3.7’)
che costituiscono un sistema di tre equazioni dal quale, fissata una delle 4 incognite (m1; m2; x1; x2) è possibile ricavare le altre tre.
Esempio 3.I
Si desidera sostituire un sistema di due masse puntiformi al parallelepipedo di acciaio rappresentato in fig.3.7.
Poiché la densità dell’acciaio è 7,8 x 103 Kg/m3, la sua massa è:
M = 7,8 x 103 × 0,2 × 0,3 × 0,5 = 234 Kg.
Il raggio di inerzia rzz , del parallelepipedo (v. par.2.3.2.2) è dato da:
r2zz = (a2+b2)/12 = 0,028 m2
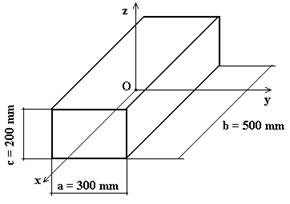
Fig. 3.7
il momento di inerzia di massa vale:
IZZ = 234× 0,028 = 6,6 kg m2
Se si decide, ad esempio, di imporre che sia m1 = 90 Kg, dalla (3.1’) si ricava:
m2 = 234 – 90 = 144 Kg
le equazioni (3.2’) e (3.7’) si scrivono:
90x1 = 144x2
90x12 + 144x22 = 6,6 kg m2
da cui:
x1 = 144/90 x2 = 1,5 x2
(90×1,62+144)x2 = 6,6 kg m2
e quindi:
x2 = 0,133 m
x1 = 0,212 m
Esempio 3.II
La biella rappresentata schematicamente in fig.3.8 fa parte di un meccanismo articolato ed il suo moto si svolge tutto in un piano parallelo a quello di rappresentazione. Si desidera sostituire alla biella un sistema di due masse.

Fig. 3.8
Detti A e B le tracce degli assi delle due coppie rotoidali alle estremità della biella, sono noti:
m = la massa della biella
a = la distanza del baricentro da A
I = il momento di inerzia di massa della biella rispetto all’asse baricentrico e normale al piano del moto
L = la distanza tra gli assi delle coppie rotoidali.
Si può fissare la posizione di una delle due masse ad esempio in A, a distanza a nota dal baricentro e determinare la distanza c dal baricentro dell’altra massa ed il valore delle due masse
mA + mC = m
mA a = mC c
mA a2 + mB b2 = I
da cui si ricava:
mA = m c/(a+c)
mB = m a/(a+c)
c = I/(m a)
E’ da osservare che normalmente il punto C non risulterà coincidente con B. Nel caso si imponga anche che l’altra massa sia in B, in linea di principio, non necessariamente potranno essere soddisfatte tutte le 3 equazioni contemporaneamente, ma solo due di esse.
Se si impone siano soddisfatte le prime due:
m’A + m’B = m
m’A a = m’B b
da cui si ricava:
m’A = m b/l
m’B = m a/l
Il sistema costituito da queste due masse è equivalente alla biella soltanto staticamente.
3.2 Sistemi ridotti
In molti casi non è necessario sostituire al sistema di partenza un sistema che sia equivalente al primo a tutti gli effetti ma è sufficiente sostituire un sistema ridotto, tale, cioè che soddisfi la stessa equazione dell’energia cinetica del sistema effettivo.
Il sistema ridotto si ottiene da quello effettivo scegliendo un asse di riduzione e riducendo a tale asse tutte le masse e le forze del sistema effettivo con la condizione che esse abbiano la stessa energia. In tale modo, dunque, le masse ridotte avranno la stessa energia cinetica di quelle effettive e le forze ridotte compiranno lo stesso lavoro.
Esempio 3.III
Il meccanismo rappresentato schematicamente in fig.3.9 (manovellismo di spinta rotativa ) ha le seguenti caratteristiche:
mP = massa cursore = 0,5 Kg
Im = momento di inerzia di massa della manovella rispetto all’asse di traccia A = 0,05 Kgm2
F = risultante delle forze che agiscono sul cursore = 1000 N
Alla biella si sostituisce un sistema equivalente di due masse concentrate l’una in C e l’altra in B che valgono rispettivamente:
mC = 0,3 Kg ; mB = 0,5 Kg
Fig. 3.9
Infine, detta J la coordinata che esprime la posizione della manovella ed ω = d J/dt la sua velocità di rotazione, si assume che la velocità del cursore sia data dall’espressione approssimata:
vc = w r sin q
dove con r si è indicato la distanza![]() , detta raggio di manovella = 0,1m
, detta raggio di manovella = 0,1m
Al meccanismo descritto si vuole sostituire un sistema ridotto all’asse di rotazione ( di traccia A) del meccanismo.
L‘asse scelto come asse di riduzione è un asse di rotazione, pertanto le masse ridotte saranno dotate di moto rotatorio. Il sistema ridotto (V. fig.3.6,b) sarà quindi costituito da un elemento di momento di inerzia di massa Ir e da un momento Mr che rappresenta la forza F, agente sul cursore, ridotta all’asse di riduzione.
Il valore del momento di inerzia di massa Ir, è dato da:
Ir = Im + Ir,B + Ir,C + Ir,P
Gli ultimi tre termini a secondo membro rappresentano i momenti di inerzia di massa rispettivamente delle masse mB; mC; mP, ridotte all’asse considerato.
Il primo di essi si ottiene immediatamente:
Ir,B = mB r2 = 0,5·0,12 = 5x10-3 kg m2
Gli altri due si ottengono imponendo l’eguaglianza delle energie cinetiche delle masse effettive con quelle delle masse ridotte:
½ mC vC2 = ½ Ir,C w2
da cui:
Ir,C = mC (vC/w) 2 = mC r2 sin2 q = mC r2 (1- cos2 q)
Ricordando che : 2 sin2 q = 1- cos 2 q, la precedente relazione si può scrivere:
Ir,C = ½ mC r2 + 1/2 mC r2 cos 2q
e risulta quindi somma di una parte costante (primo termine a 2° membro) più una parte variabile avente valore medio nullo.
Analogamente si calcola:
Ir,P = ½ mP r2 + 1/2 mP r2 cos 2q
La forza F, agente sul cursore, ridotta all’asse di riduzione sarà rappresentata da un momento Mr che si ottiene imponendo le eguaglianza dei lavori:
F dSC = Mr dq
avendo indicato con SC lo spostamento del punto C
Dalla precedente relazione si ricava:
Mr = F dSC / dq = dt/dq · dSC /dt = F 1/w vC = F r sinq
Anche Mr risulta variabile con q.
La variabilità di Ir e di Mr dipende dal fatto che i rapporti fra vC ed ω, ossia tra SC e q, non sono costanti.
3.2.1 Sistema ridotto di una macchina
Nell’ipotesi che tutti gli organi di una macchina siano rigidi, ed i giochi siano nulli, la macchina stessa è un sistema ad 1 grado di libertà. Come si è visto nell’esempio precedente può essere considerata come costituita da un unico rotore avente momento di inerzia di massa Ir (il cui valore è dato da tutte le masse che si muovono, ridotte all’asse della macchina) e da un momento (il cui valore è dato da tutte le forze esterne ridotte all’asse della macchina).
Tale sistema rappresenta il sistema ridotto della macchina.
Se la macchina è motrice, il momento ha lo stesso verso della rotazione della macchina. Se la macchina è utilizzatrice, momento e rotazione del suo albero sono opposti.
Come è noto, la potenza della macchina è data dal prodotto del momento per la velocità angolare:
P = M · ω
E’ infine da osservare che, se il momento è costante con q la macchina si dice a regime assoluto; ciò avviene nei motori elettrici, nelle pompe centrifughe ed in generale in tutte le macchine nelle quali tutti gli organi in movimento si muovono con moto puramente rotatorio. Le macchine che forniscono, o assorbono, un momento il cui valore è variabile con q si dicono macchine a regime periodico.
Macchine a regime periodico sono, ad esempio, i motori alternativi, i compressori e le pompe alternative ed, in generale, tutte quelle macchine nelle quali alcuni organi non si muovono con moto puramente rotatorio. In queste macchine, come si è visto, il momento di inerzia di massa ridotto all’asse di rotazione non è costante; la variabilità del momento (motore o resistente) di tali macchine dipende anche da questa circostanza.
In fig.3.10 è riportato l‘andamento del momento di un motore in funzione di q di un motore a combustione interna monocilindro a 4 tempi
Fig. 3.10
3.3 Caratteristica meccanica di una macchina
Nella maggior parte delle macchine, motrici o utilizzatrici che siano, il momento non è costante con la velocità di rotazione; si definisce caratteristica meccanica di una macchina la funzione che lega il momento (motore o resistente a seconda della macchina) alla velocità angolare.
Fig.3.11
Se una macchina è a regime periodico, il valore del momento è il valore medio del periodo. Nella fig.3.11 sono rappresentate, a titolo di esempio, le caratteristiche meccaniche (qualitativamente) di alcune macchine.
Esempio 3.IV(Applicazione del teorema della energia cinetica)
Un disco di caratteristiche note rotola su di una rotaia. All’istante t = 0 la sua velocità V(0) = 1 m/s. Determinare lo spazio necessario all’arresto.
Dati:
massa del disco = 10 Kg
raggio r del disco = 200 mm
IG = momento di inerzia di massa = 1 Kgm2
Coefficiente di attrito volvente f = 0,005
Fig.3.12
Il disco si trova sotto l’azione della forza di inerzia e della resistenza di attrito volvente. Quest’ultima vale:
R = f N = f M g = 0,005 · 10 · 9.81 » 0,5 N
Detto x lo spostamento del disco, per il teorema dell’energia cinetica:
DE = - R x
Si osservi che DL(e) ha il segno – perché è un lavoro resistente
Nel momento in cui il disco si ferma, la sua energia cinetica è nulla, per cui la variazione ΔE tra l’istante t = 0 e l’istante in cui il disco si ferma vale:
![]()
da cui:
x = -DE/R = 17,5/0,5 = 35 m
Esempio 3.V(Applicazione del teorema di d’Alembert)
Il quesito dell’esempio precedente si può risolvere applicando direttamente il teorema di d’Alembert.
Applicando la seconda equazione cardinale della dinamica, si scrive l’equilibrio dei momenti rispetto al polo O:
![]()
ossia:
![]()
da cui:
![]()
L’accelerazione del baricentro sarà:
![]()
Il moto è uniformemente accelerato (con accelerazione negativa) per cui la velocità è data da:
![]()
da cui, il tempo ![]() per cui V(G) = 0 è pari a:
per cui V(G) = 0 è pari a:
![]()
e lo spazio percorso è pari a:
![]()
Esempio 3.VI (Riduzione delle masse)
Per l’argano rappresentato schematicamente in fig.3.12 si determini il momento motore da applicare al tamburo per ottenere un’accelerazione del carico di 2m/s2.
Dati:
I0 = momento di massa della puleggia = 1 Kgm2
r = raggio della puleggia = 0,2 m
M = massa della cabina = 300 Kg
Occorre, innanzi tutto, ridurre il sistema all’asse (di traccia O) della puleggia.
Il momento di inerzia di massa IC della massa della cabina, ridotta all’asse della puleggia si ricava da:
![]()
Fig.3.13
per cui:
![]()
In definitiva:
IO,tot = IO + IC = 13 kg m2
La forza peso che agisce sulla cabina vale:
P = M·g = 300 · 9,81 ![]() 3000 N
3000 N
Questa forma, ridotta all’asse della puleggia si calcola mediante l’uguaglianza dei lavori:
P dS = MP dq
da cui:
MP = dS/dq = P r = 3000·0,2 = 600 Nm
Il sistema ridotto all’asse della puleggia è costituito, quindi, da:
Affinché la cabina abbia l’accelerazione desiderata, l’accelerazione della puleggia deve essere :
![]()
Il momento motore, necessario a realizzarla è:
Macc = IO,tot dw/dt = 13·10 = 130 Nm
Il momento totale che il motore deve essere in grado di fornire è:
Mtot = 130 + 600 = 730 Nm
E’ da osservare che, normalmente, gli impianti di sollevamento sono dotati di un contrappeso che ha la funzione di ridurre la coppia necessaria al sollevamento del carico.
3.4 Il rendimento meccanico
Si consideri un gruppo costituito da una macchina motrice che fornisce energia meccanica ad una macchina utilizzatrice attraverso un meccanismo.
Fig.3.14
Nel meccanismo di trasmissione tra le due macchine “entra” la potenza motrice Pm ed “esce” la potenza utilizzatrice Pu, minore di Pm perché parte di quest’ultima viene dissipata per effetto delle resistenze passive.
Si definisce rendimento meccanico η del meccanismo il rapporto:
![]()
che risulta, ovviamente, sempre minore di 1.
In un meccanismo l’organo che riceve il moto dalla macchina motrice si dice movente; l’organo che è collegato alla macchina utilizzatrice si dice cedente.
In molte applicazioni il collegamento tra motrice ed utilizzatrice può essere realizzato mediante più di un meccanismo. I meccanismi possono essere collegati tra di loro in serie o in parallelo.
3.4.1 Rendimento dei meccanismi in serie
I meccanismi si dicono collegati in serie se il cedente di uno è collegato al movente dell’altro.

Fig.3.15
Dalla definizione di rendimento, si ricava che:
![]()
cioè: il rendimento dei meccanismi in serie è dato dal prodotto dei rendimenti dei singoli meccanismi. Ciò implica che, se si impiega anche un solo meccanismo avente un basso rendimento, il rendimento di tutta la trasmissione si abbassa notevolmente.
3.4.2 Rendimento dei meccanismi in parallelo
Due o più meccanismi si dicono collegati in parallelo se essi hanno in comune il movente o il cedente.
Nella fig.3.16 è mostrata, schematicamente, una macchina motrice che fornisce il moto ad alcuni utilizzatori.
In questo caso il rendimento è dato da:
![]()
Cioè il rendimento globale è la media pesata dei rendimenti dei vari meccanismi; il “peso” è dato dal rapporto Lmi/Lm. Il rendimento complessivo sarà dunque maggiormente influenzato dal rendimento di quei meccanismi che sono collegati agli utilizzatori che assorbono un’aliquota maggiore del lavoro motore.
Fig.3.16
3.4.3 Meccanismi irreversibili
Quando in un meccanismo il moto entra dall’organo cedente ed esce dall’organo movente, il moto stesso viene detto moto retrogrado. Non tutti i meccanismi consentono il moto retrogrado; un meccanismo che lo consente è detto reversibile, se non lo consente è detto irreversibile.
Esempio 3.VII (Piano inclinato)
Come esempio si consideri il piano inclinato rappresentato in fig.3.17.
Fig.3.17
Il moto retrogrado avviene se, in assenza di forza motrice, il corpo si muove verso il basso per effetto della forza peso. Perché ciò si verifichi deve risultare:
f N < P sin a
ossia:
f < (P sin a)/N = (P sin a)/(P cos a) = tg a
Dunque un meccanismo che funzioni sul principio del piano inclinato sarà irreversibile se f > tg a.
Si dimostra che, in un meccanismo irreversibile, il rendimento è h< 0,5.
Un esempio di meccanismo irreversibile, realizzato nel principio del piano inclinato è la coppia vite-madrevite che ha numerosissime applicazioni; una delle più comuni è la coppia vite-dado utilizzata per il collegamento di organi meccanici (V. fig.3.18)
Fig.3.18
Applicando un momento M alla vite essa si “avvita” nella madrevite ricavata nel dado D; tra quest’ultimo e la testa della vite si genera una forza in direzione dell’asse della vite che assicura il collegamento tra gli elementi A e B.
Tale meccanismo deve essere irreversibile perché, quando il momento M non è applicato, la forza assiale non deve essere in grado di far ruotare la vite che altrimenti si “sviterebbe”.
3.5 Il funzionamento di un gruppo di macchine
Nella maggior parte di essi una macchina non opera da sola ma è accoppiata con un’altra macchina o con più macchine. Si definisce gruppo l’accoppiamento di una (o più di una) macchina motrice con una (o più) macchina utilizzatrice.
3.5.1 Condizioni di regime
Come si è visto in un precedente paragrafo, una macchina, presa a se stante, può essere a regime assoluto o periodico.
Nel caso di un gruppo di macchine, si dice che il gruppo è in condizione di regime se si verifica che:
Momento motore = momento resistente
Se entrambe le macchine che costituiscono il gruppo sono a regime assoluto, l’equazione sopra riportata sarà verificata in ogni istante ed il gruppo sarà detto a regime assoluto.
Se invece una delle due macchine (o entrambe) è a regime periodico, l’equazione precedente non è verificata istante per istante. L’impianto si dice a regime periodico; esso sarà in condizione di regime se:
Momento motore medio = momento resistente medio
Per un gruppo di macchine, sia esso a regime periodico o assoluto, l’equazione dell’energia cinetica si scrive:
(Mm – Mr) dq = ½ d (I w2) (3.11)
dove:
Mm = momento motore
Mr = momento resistente = Mu + Mp
Mu = momento resistente utile
Mp = momento resistente dovuto alle forze passive.
I = momento d’inerzia di massa ridotto del gruppo
Questa equazione esprime il concetto: istante per istante, il lavoro compiuto dalla differenza tra momento motore e momento resistente è uguale alla variazione di energia cinetica.
Si consideri un gruppo a regime periodico costituito da due macchine entrambe a regime periodico i cui momenti in funzione di J sono riportati in fig.3.19
Fig.3.19
Come si può osservare, l’impianto è a regime poiché risulta Mm,medio = Mresist.medio .
Nella figura 3.19 è riportato (qualitativamente) l’andamento della velocità: nell’intervallo compreso tra J1 e J2 il momento motore è maggiore di quello resistente, di conseguenza la variazione di energia cinetica è positiva quindi la velocità del gruppo aumenta. In corrispondenza della posizione angolare J2 l’energia cinetica e la velocità angolare del gruppo raggiungerà sicuramente un massimo relativo. Tra J2 e J3 è il momento resistente a prevalere su quello motore, di conseguenza energia cinetica e velocità del gruppo diminuiscono fino a raggiungere un minimo relativo in corrispondenza di J.
Da quanto detto, si evince che, la velocità di un gruppo varia fra un valore massimo ed un valore minimo. Detti ω2 e ω1 i valori massimo e minimo rispettivamente, si definisce grado di irregolarità nel periodo la quantità:
![]()
Come è noto, si definisce periodo di una funzione (periodica) l’intervallo trascorso il quale la funzione assume gli stessi valori. Nel caso di una macchina a regime periodico, definiremo periodo angolare della macchina l’angolo Θ (rotazione dell’albero della macchina stessa) tale che:
M(q) = M(q+Q)
Il minimo comune multiplo dei periodi di due macchine che costituiscono un gruppo (cioè il più piccolo angolo che contiene un numero intero di periodi della macchina motrice e di quella utilizzatrice), dato cioè dalla relazione:
Θ = Km Θm = Kr Θr con Km e Kr primi tra di loro
è il periodo del gruppo, poiché, dopo tale rotazione, la funzione f(J) = Mm (J) – Mr (J) assume gli stessi valori. Per quanto detto, Θ rappresenta anche il periodo della velocità angolare del gruppo: ω(J) = ω(J + Θ).
Come si può intuire dalle (3.11), per una stessa differenza fra momento motore e momento resistente, cioè a parità di variazione di energia cinetica, la variazione di velocità angolare sarà tanto minore quanto maggiore è il momento di inerzia di massa delle masse degli organi in moto delle due macchine, ridotte all’asse del gruppo. Per contenere il grado di irregolarità nel periodo occorre dunque aumentare il momento di inerzia di massa del gruppo. Ciò si ottiene montando opportunamente (sull’asse del gruppo) un organo di elevato momento di inerzia di massa che viene detto volano.
Come si è visto nell’esempio sul sistema ridotto del meccanismo di fig.3.9, il momento di inerzia di massa I a secondo membro nella (3.11), che rappresenta le masse in movimento di entrambe le macchine ridotte all’asse di rotazione del gruppo, è somma di una parte costante Ir dovuta alle masse che si muovono di moto rotatorio e di una parte variabile Ia dovuta alle masse che si muovono di moto non rotatorio, per cui:
½ d(I w2) = ½ [ Ir dw2 + Ia dw2 + w2 dIa ] (3.12)
A meno del segno tutti i termini rappresentano lavori delle forze di inerzia.
Il primo termine a secondo membro rappresenta il lavoro delle forze di inerzia delle masse che si muovono di moto rotatorio.
Il secondo ed il terzo termine rappresentano il lavoro delle forze di inerzia delle masse che si muovono di moto non rotatorio; il secondo per effetto della variazione di velocità, il terzo per effetto della variazione del momento di inerzia ridotto di tali masse.
3.6 Determinazione del momento di inerzia
del volano
In un gruppo a regime periodico il corretto funzionamento della macchina utilizzatrice è assicurato se il grado di irregolarità nel periodo non supera un valore che dipende dalla macchina utilizzatrice stessa. A titolo di esempio si riportano i valori di δ per alcune macchine utilizzatrici:
Machina |
d |
Macchine di sollevamento, pompe, seghe |
1/20÷1/30 |
Macchine per tessitura e cartiere |
1/40÷1/45 |
Macchine per filatura |
1/80÷1/100 |
Dinamo |
1/150 |
Alternatori |
1/300 |
Un metodo per determinare il momento di inerzia di massa che deve avere un volano per contenere il grado di irregolarità di un gruppo entro il valore fissato è stato proposto dal Tredgold; esso si fonda su due ipotesi semplificative:
1a ipotesi semplificativa: si assume che il valore medio della velocità angolare sia pari alla media aritmetica del valore massimo ω2 e del valore minimo ω1 :
![]()
Di conseguenza, risulta:
![]()
2a ipotesi semplificativa: nel calcolo del lavoro delle forze di inerzia delle masse dotate di moto non rotatorio si considera la velocità costante. Ciò implica che nel secondo termine a secondo membro della (3.12) viene trascurata la quantità: Ia dw2 .
Questa ipotesi semplificativa porterà a determinare un momento di inerzia di massa superiore a quello strettamente necessario perché si è trascurata un lavoro il cui effetto è quello di contenere gli scarti di velocità.
L’equazione dell’energia cinetica del gruppo si scrive allora:
(Mm – Mr) dq = ½ ( Ir dw2 + w2 dIa )
Come già detto, il termine w2 dIa rappresenta, a meno del segno, il lavoro delle forze di inerzia delle masse non rotanti, dovuto alla variazione di velocità; esso può essere portato a primo membro. Indicando con M’m ed M’r i momenti delle due macchine calcolati tenendo conto dei momenti delle forze di inerzia delle masse non rotanti, si può scrivere:
(M’m – M’r) dq = ½ Ir dw2
Integrando il secondo membro tra i valori minimo e massimo della velocità angolare ed il primo membro tra le corrispondenti posizioni angolari del gruppo, si ottiene:
![]() (3.13)
(3.13)
L’integrale al primo membro rappresenta la massima variazione di energia cinetica nel periodo, per cui:
![]()
da cui si ricava immediatamente il valore del grado di irregolarità ![]() che il gruppo realizza senza l’aggiunta del volano:
che il gruppo realizza senza l’aggiunta del volano:
![]()
Se tale valore è inferiore a quello desiderato, non occorre (ovviamente) alcun volano; in caso contrario occorrerà aumentare, (con un volano di momento di inerzia di massa IV) il momento di inerzia di massa del gruppo per contenere δ entro il valore fissato:
![]()
Nella maggior parte dei casi Mm(J) ed Mr(J) sono funzioni la cui espressione analitica non è nota; è possibile però calcolare, a partire da dati sperimentali, un insieme di valori discreti di entrambe le funzioni. Per questo motivo la quantità ΔE viene calcolata integrando numericamente il primo membro della (3.13).
Esempio 3.VIII
Si consideri un gruppo costituito da un motore elettrico che, attraverso un meccanismo riduttore di velocità, muove una macchina utilizzatrice. Quest’ultima è schematizzata da un braccio di lunghezza l all’estremità del quale agisce una forza resistente F=1000N per una frazione pari a p/2 dell’intera rotazione.
Si desidera calcolare, per tale gruppo, il momento di inerzia di massa di un volano che contenga il grado di irregolarità al valore di 1/30.
Sono noti:
l = 1000 mm
ε = rapporto tra le velocità angolari = ω1/ω2 = 10
Im = momento di inerzia di massa del rotore del motore = 0,2 kgm2
Iu = momento di inerzia di massa dell’utilizzatore = 5 kg m2
ω1 = 150 rad/s
Si supponga di poter assumere il rendimento del meccanismo riduttore uguale ad 1.
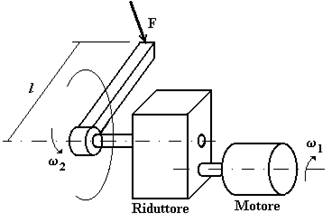
Fig.3.20
E’ opportuno ridurre tutto il gruppo ad un asse di riduzione; quest’ultimo sia quello del motore.
Si calcolano:
Il momento di inerzia di massa della macchina utilizzatrice ridotta all’asse di riduzione.
Iu,r = Iu(w2/w1)2 = 5·1/100 = 0,05 kg m2
Il momento resistente ridotto all’asse di riduzione:
Mu,r = F l (dq2/dq1) = F l (w2/w1) = 1000·1·1/10 = 100 N m
Da quanto detto in precedenza è facile tracciare il diagramma del momento resistente, riportato in fig.3.21.
Il valore medio del momento resistente è:
![]()
All’uscita del riduttore il momento motore dovrà essere pari a tale valore se il gruppo è in condizioni di regime.

Fig.3.21
La massima variazione di energia cinetica sarà pari a:
![]()
Il momento di inerzia di massa del volano sarà dato da:
![]()
Avendo supposto η = 1 il momento che il motore elettrico deve fornire all’ingresso del meccanismo riduttore si ricava dalla relazione:
Mr,med q2 = Mm q1
da cui:
Mm = Mr,med (q2/q1) = Mr,med (w2/w1) = 250·1/10 = 25 N m
Se si considera che il rendimento del meccanismo riduttore sia pari al 90%, il momento motore dovrà essere pari a:
Mm = 25·1/0.9 = 27.8 N m
La potenza del motore sarà pari a:
P = Mm w = 27,8·150 = 4,17 kW
Si osservi che, senza il volano, oltre a dover tollerare un elevato grado di irregolarità nel periodo, sarebbe stato necessario utilizzare un motore in grado di fornire un momento 4 volte maggiore per poter ”far fronte” alla richiesta di momento ciclica dell’utilizzatore.
3.7 STABILITA’ DELLE CONDIZIONI DI REGIME
L’andamento delle caratteristiche meccaniche delle macchine (la motrice e la utilizzatrice) che costituiscono il gruppo indicano se le condizioni di regime sono stabili o meno. Si consideri un gruppo costituito da una macchina motrice accoppiata ad una utilizzatrice aventi le curve caratteristiche meccaniche rappresentate in fig. 3.22. Il punto del piano M(w),w per il quale il gruppo è a regime è individuato dall’intersezione delle due caratteristiche meccaniche (Mm=Mu) ed è indicato in figura con P; pertanto il gruppo ruoterà alla velocità di regime wr. Se, per un qualsiasi motivo, il momento resistente diminuisce (la nuova curva del momento resistente sia quella tratteggiata) risulterà Mm>Mu e la velocità angolare del gruppo aumenterà. All’aumentare della velocità il momento motore diminuisce mentre il momento della macchina utilizzatrice aumenta per cui il gruppo si porterà di nuovo il condizioni di regime (Mm=Mu) ad una nuova velocità wr2 più elevata della wr. Se invece il momento resistente aumenta (curva tratti e punti) risulterà Mm<Mu e la velocità angolare del gruppo diminuirà. Al diminuire della velocità il momento motore aumenta mentre il momento della macchina utilizzatrice diminuisce ed il gruppo si porterà di nuovo il condizioni di regime (Mm=Mu) ad una nuova velocità wr3 più bassa. Il comportamento del gruppo è dunque stabile.
Fig. 3.22
Le curve caratteristiche delle due macchine sono tali che risulta:
![]()
La precedente relazione, se verificata, indica che le condizioni di regime del gruppo sono stabili.
Si consideri ora un gruppo per il quale le macchine hanno le caratteristiche meccaniche riportate in fig. 3.23.
Il gruppo ha una condizione di regime individuata dal punto P per una velocità angolare ma, l’andamento delle curve è tale che risulta:
![]()
Tale condizione indica che il gruppo è instabile. Infatti se si osserva la fig. 3.23 si capisce che se il momento dell’utilizzatore diminuisce, all’aumentare della velocità w del gruppo risulterà sempre Mm>Mu e la velocità angolare continuerà ad aumentare senza che, quindi, il gruppo raggiunga nuove condizioni di regime. Se invece il momento dell’utilizzatore aumenta, al diminuire della velocità risulterà sempre Mm<Mu e la velocità angolare continuerà a diminuire fino a che il gruppo si arresta.

Fig. 3.23
Per i gruppi stabili, qualora la variazione di velocità con il variare del carico sia tollerabile, non è necessario disporre di un sistema di regolazione esterno; invece i gruppi instabili hanno bisogno, per il loro funzionamento, di un sistema di regolazione esterno.
A titolo di esempio di quanto appena detto, si immagini un autovettura che percorre un tratto in discesa con forte pendenza: la caratteristica meccanica del motore (ad elevata velocità di rotazione) è decrescente mentre il momento resistente (dovuto alle forze che si oppongono al moto dell’autovettura) è crescente (grossolanamente col quadrato della velocità di avanzamento); per questo motivo il gruppo è stabile e quindi il motore dell’automobile raggiungerebbe (per una velocità dell’automobile molto elevata) una velocità di rotazione in corrispondenza della quale momento motore è uguale al momento resistente. Tuttavia, la velocità di rotazione raggiunta dal motore potrebbe essere talmente elevata da compromettere la sua integrità; in questo caso, prima che ciò accada, il conducente solleverà il piede dall’acceleratore riducendo, così, il momento motore. Il conducente, dunque, agirà da sistema di regolazione.
Fonte: https://www.docenti.unina.it/downloadPub.do?tipoFile=md&id=98136
Sito web da visitare: https://www.docenti.unina.it
Autore del testo: non indicato nel documento di origine
Il testo è di proprietà dei rispettivi autori che ringraziamo per l'opportunità che ci danno di far conoscere gratuitamente i loro testi per finalità illustrative e didattiche. Se siete gli autori del testo e siete interessati a richiedere la rimozione del testo o l'inserimento di altre informazioni inviateci un e-mail dopo le opportune verifiche soddisferemo la vostra richiesta nel più breve tempo possibile.
I riassunti , gli appunti i testi contenuti nel nostro sito sono messi a disposizione gratuitamente con finalità illustrative didattiche, scientifiche, a carattere sociale, civile e culturale a tutti i possibili interessati secondo il concetto del fair use e con l' obiettivo del rispetto della direttiva europea 2001/29/CE e dell' art. 70 della legge 633/1941 sul diritto d'autore
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
"Ciò che sappiamo è una goccia, ciò che ignoriamo un oceano!" Isaac Newton. Essendo impossibile tenere a mente l'enorme quantità di informazioni, l'importante è sapere dove ritrovare l'informazione quando questa serve. U. Eco
www.riassuntini.com dove ritrovare l'informazione quando questa serve