I riassunti , gli appunti i testi contenuti nel nostro sito sono messi a disposizione gratuitamente con finalità illustrative didattiche, scientifiche, a carattere sociale, civile e culturale a tutti i possibili interessati secondo il concetto del fair use e con l' obiettivo del rispetto della direttiva europea 2001/29/CE e dell' art. 70 della legge 633/1941 sul diritto d'autore
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
Richiami di trigonometria ordinaria, sferica e iperbolica
Riteniamo opportuno presentare, prima del capitolo dedicato alle dimostrazioni, un capitolo a sé stante descrivente gli elementi essenziali della trigonometria iperbolica, che ci saranno necessari per alcuni sviluppi "metrici" delle nostre argomentazioni. Premetteremo ad essi gli analoghi elementi di trigonometria ordinaria e sferica che li hanno storicamente (e concettualmente) preceduti.
Cominciamo naturalmente dalla trigonometria ordinaria, o euclidea. Si tratta di determinare le relazioni che intercorrono tra le lunghezze dei lati di un triangolo (riferite a una fissata unità di misura; ricordiamo che si tratta di numeri reali) e le misure dei relativi angoli (che supponiamo ora espresse in radianti; anch'esse naturalmente sono espresse mediante numeri reali).
Ecco qui di seguito due figure che ci faranno da guida per la definizione dei simboli che useremo; a sinistra è raffigurato un triangolo rettangolo, a destra un triangolo "generico" (abbiamo evidenziato il segmento ![]() , di lunghezza h, l'altezza relativa al lato maggiore). Si osservi che supponiamo implicitamente x ³ y.
, di lunghezza h, l'altezza relativa al lato maggiore). Si osservi che supponiamo implicitamente x ³ y.
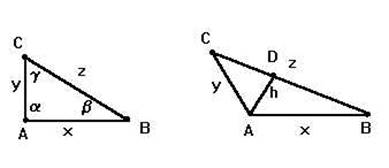
(Figura XIV.1)
Il teorema più noto, e probabilmente più antico, in tale contesto è il cosiddetto teorema di Pitagora, che stabilisce la nota relazione tra il quadrato dell'ipotenusa e la somma dei cateti di un triangolo rettangolo:
(XIV.1) z2 = x2 + y2 .
Ecco qui di seguito due dimostrazioni grafiche del teorema di Pitagora che non richiedono alcun commento verbale, solo che le figure vengano "viste" e comprese.
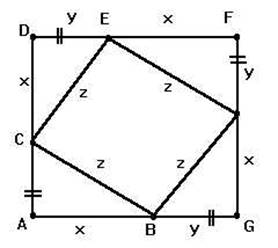
(Figura XIV.2)
( Manifestamente: (x+y)2 = z2 + 4![]() )
)

(Figura XIV.3)
(Manifestamente: z2 = (x-y)2 + 4![]() - Il matematico indiano Bhaskara, XII secolo, nella sua opera Bijaganita, si limita semplicemente a dire: "Vedete!".)
- Il matematico indiano Bhaskara, XII secolo, nella sua opera Bijaganita, si limita semplicemente a dire: "Vedete!".)
Vogliamo aggiungere alle precedenti un'ulteriore dimostrazione del teorema di Pitagora [Tra le numerosissime conosciute; in particolare quella originale di Euclide, Prop. XLVII del Libro I, poi generalizzata al caso di figure diverse dai quadrati nella Prop. XXXI del Libro VI, è un'altra ancora, basata sulla teoria dell'equivalenza], più "complicata" di quelle "viste" dianzi, ma anch'essa istruttiva, per diversi aspetti. Osserviamo subito che, in ogni caso, si tratta di dimostrazioni euclidee (in quelle già proposte si utilizzava il fatto che la somma degli angoli di un triangolo è un angolo piatto, e il concetto di "quadrato" geometrico), né se ne potrebbero trovare delle altre, dal momento che il teorema in oggetto non è una proposizione universale, come del resto ci convinceremo pienamente in questo stesso capitolo, quando vedremo la forma assai peculiare((XIV.16')) che esso assume in geometria non euclidea (iperbolica).

(Figura XIV.4)
La Fig. XIV.4 presenta un triangolo rettangolo, al quale fa da "base" orizzontale l'ipotenusa, mentre la relativa altezza ![]() lo decompone in due triangoli rettangoli ADB e ADC, di cui abbiamo detto rispettivamente a' e a" gli angoli corrispondenti al vertice A. Essi sono simili, ma nell'ordine ADB e CDA, perché a' = g e a" = b (infatti:
lo decompone in due triangoli rettangoli ADB e ADC, di cui abbiamo detto rispettivamente a' e a" gli angoli corrispondenti al vertice A. Essi sono simili, ma nell'ordine ADB e CDA, perché a' = g e a" = b (infatti:
a' + b = 90° = a" + g = b + g , mentre l'angolo in D è quello retto per i due triangoli), sicché esiste un numero reale t (maggiore di 1) tale che ![]() = t =
= t = ![]() =
= ![]() , o meglio, i tre numeri reali costituiti dai rapporti di lati "omologhi" coincidono in uno stesso numero (scriviamo queste identità per completezza, ci serviremo in effetti di altre). Allo stesso modo l'intero triangolo ABC è simile a ciascuno dei due triangoli più piccoli, riferiamoci dapprima alla similitudine tra ABC e DBA, nell'ordine preciso. Se ne deduce che esiste un numero reale u (maggiore di 1) tale che:
, o meglio, i tre numeri reali costituiti dai rapporti di lati "omologhi" coincidono in uno stesso numero (scriviamo queste identità per completezza, ci serviremo in effetti di altre). Allo stesso modo l'intero triangolo ABC è simile a ciascuno dei due triangoli più piccoli, riferiamoci dapprima alla similitudine tra ABC e DBA, nell'ordine preciso. Se ne deduce che esiste un numero reale u (maggiore di 1) tale che: ![]() = u =
= u = ![]() =
= ![]() . Analogamente, dalla similitudine tra ABC e DAC, nell'ordine, si deduce che esiste un numero reale v (maggiore di 1) tale che:
. Analogamente, dalla similitudine tra ABC e DAC, nell'ordine, si deduce che esiste un numero reale v (maggiore di 1) tale che: ![]() = w =
= w = ![]() =
= ![]() . La conclusione si raggiunge allora scrivendo z =
. La conclusione si raggiunge allora scrivendo z = ![]() +
+ ![]() =
= ![]() +
+ ![]() . [Il ruolo fondamentale della similitudine nella precedente dimostrazione richiama senz'altro il quinto postulato di Euclide nella forma che abbiamo detto "postulato di Wallis".]
. [Il ruolo fondamentale della similitudine nella precedente dimostrazione richiama senz'altro il quinto postulato di Euclide nella forma che abbiamo detto "postulato di Wallis".]
Abbiamo detto che la dimostrazione precedente è utile sotto diversi aspetti. La prima cosa che ci sembra opportuno sottolineare a uno "studente", è che i due triangoli "piccoli" sono in effetti simili anche se non appaiono tali a semplice vista. Inoltre, che essi sono simili, e in generale non identici, pur avendo hanno un lato in comune: si potrebbe allora pensare che il relativo "rapporto di similitudine" sia uguale a 1, mentre in generale (a meno che cioè il triangolo rettangolo non sia pure isoscele) non sarà evidentemente così. Tutto dipende naturalmente dall'ordine con cui deve essere verificata l'uguaglianza di angoli (o la proporzionalità di lati) corrispondenti (omologhi) nella similitudine di cui trattasi (è istruttivo ritagliare i due triangoli da una figura di carta, e far "vedere" la similitudine riportando il vertice A del triangolo più piccolo sul vertice C del triangolo più grande). La seconda puntualizzazione che potrebbe essere proposta, è relativa alle enunciazioni precise con cui bisogna intendere i famosi tre "criteri di uguaglianza" dei triangoli. Mettendo da parte quello più semplice, che corrisponde all'avere i tre lati uguali (i tre angoli uguali sono appunto invece il caso dei triangoli simili), che viene dimostrato da Euclide per secondo (Prop. VIII del I libro), è chiaro che nell'enunciato del primo criterio (Prop. IV del I libro) devono essere uguali due lati e l'angolo compreso, e che non è sufficiente l'uguaglianza di due lati e di un altro angolo (basta pensare al "nostro" triangolo rettangolo x, y, z, e immaginarne uno nuovo in cui x sia l'ipotenusa e y ancora un cateto). Le maggiori difficoltà le offre secondo noi il terzo criterio (Prop. XXVI del I libro), che si riferisce all'uguaglianza di un lato e di due angoli. Esso viene espresso talora richiedendo l'uguaglianza di un lato e dei due angoli ad esso adiacenti, ma tale condizione restrittiva può essere omessa, come dimostra per l'appunto Euclide. Ma si noti, soprattutto nel nostro particolare contesto!, che tale "generalizzazione" è ovvia qualora si assuma il V postulato (la somma degli angoli di un triangolo essendo allora uguale a un angolo piatto, ecco che se due angoli sono uguali, allora è di necessità uguale anche il terzo), mentre lo è meno qualora si tenti della stessa proposizione una dimostrazione "universale", che è precisamente ciò in cui riesce Euclide (si rammenti che tutte le prime 28 proposizioni del I libro sono indipendenti dal V postulato). Inoltre, tornando al punto oggetto di questo inciso, che per l'uguaglianza dei due triangoli presi in considerazione è sufficiente sì l'uguaglianza di un lato e di due angoli qualsiasi, ma che bisogna stare ben attenti all'ordine con cui tali uguaglianze si verificano: infatti, l'esempio precedente dei due triangoli piccoli in cui si decompone un triangolo rettangolo mostra proprio due triangoli che hanno un lato uguale, tutti e tre gli angoli uguali, ma non sono (ripetiamo, in generale) uguali.
Restando nell'ambito dei triangoli rettangoli, sono a tutti gli studenti di liceo familiari le relazioni che definiscono le funzioni circolari sin, cos e tg degli angoli del triangolo, in funzione delle lunghezze x, y, z:
(XIV.2) x = z*cos(b) = z*cos(![]() -g) = z*sin(g)
-g) = z*sin(g)
y = z*cos(g) = z*sin(b)
![]() =
= ![]() = tg(g) ,
= tg(g) , ![]() =
= ![]() = tg(b) = tg(
= tg(b) = tg(![]() -g) =
-g) = ![]() .
.
[Le (XIV.2) si riferiscono ad angoli non nulli e minori di 90°, e quindi a valori delle funzioni circolari che sono dei numeri reali positivi. Esse si estendono facilmente, come si sa, al caso di angoli (convessi) qualsiasi, fornendo allora come risultato dei numeri reali con segno, e da qui al caso di un valore del loro "argomento" che sia un qualsivoglia numero reale. Accenneremo più avanti anche all'estensione che codeste funzioni possiedono nel campo complesso.]
[Un'osservazione didattica. Naturalmente, proponendo le (XIV.2) come "definizioni", ecco che bisogna far vedere come i valori del coseno e del seno dipendano soltanto dall'angolo non ordinato assegnato, e non dagli elementi accessori che si utilizzano per la loro introduzione, vale a dire il triangolo rettangolo ABC. Si tratta allora in sostanza di far vedere che quei rapporti risultano invariati qualora si sostituisca un triangolo rettangolo a un altro, il che consegue facilmente dall'osservazione del verificarsi di precise similitudini tra i triangoli in gioco. La presente osservazione ha ovviamente anche a che fare con la nota riportata nel Cap. X, nella quale si provava che il morfismo indotto da una proiezione non dipende dall'ordine con cui le due semirette incidenti vengono considerate.]
Nel caso di un triangolo qualsiasi, con riferimento al vertice A, e al corrispondente angolo a, la precedente relazione (XIV.1) si generalizza nell'identità nota come teorema di Carnot:
(XIV.3) z2 = x2 + y2 -2xy*cos(a) .
[La (XIV.3) ha come conseguenza naturale la circostanza che l'identità z2 = x2 + y2 caratterizza esattamente i triangoli rettangoli, di ipotenusa z.]
Per la dimostrazione si può usare la decomposizione in due triangoli rettangoli di cui alla Fig. XIV.1, oltre naturalmente alle (XIV.2), ma è ovviamente più conveniente usare l'algebra vettoriale (o come si dice oggi lineare). Rammentiamo (per chi già sa di queste cose, o per invogliare a saperne) che, fissata un'unità di misura nel piano ordinario, si può definire un prodotto scalare (per cui usiamo il simbolo ´)tra due vettori astratti non nulli ![]() ,
, ![]() mediante l'identità:
mediante l'identità: ![]() ´
´![]() =
= ![]() *
*![]() *cos(q) , con simbolismo meno pesante e autoesplicativo
*cos(q) , con simbolismo meno pesante e autoesplicativo ![]() ´
´![]() = v*w*cos(q) , dove q è l'angolo (convesso) tra i due vettori in parola (tale "prodotto" corrisponde al concetto di lavoro, e quindi di energia, in fisica - si veda se si vuole: http://www.dipmat.unipg.it/~bartocci/st/energ3.doc). Tale operazione (ovviamente commutativa), che associa a due vettori un numero reale con segno, si estende a tutti i vettori, con l'ovvia posizione che il prodotto scalare sia zero quando uno dei due vettori è zero, e si dimostra la sua proprietà fondamentale, di essere distributiva rispetto alla somma di vettori. Vale a dire, si dimostra che essa soddisfa all'identità:
= v*w*cos(q) , dove q è l'angolo (convesso) tra i due vettori in parola (tale "prodotto" corrisponde al concetto di lavoro, e quindi di energia, in fisica - si veda se si vuole: http://www.dipmat.unipg.it/~bartocci/st/energ3.doc). Tale operazione (ovviamente commutativa), che associa a due vettori un numero reale con segno, si estende a tutti i vettori, con l'ovvia posizione che il prodotto scalare sia zero quando uno dei due vettori è zero, e si dimostra la sua proprietà fondamentale, di essere distributiva rispetto alla somma di vettori. Vale a dire, si dimostra che essa soddisfa all'identità: ![]() ´
´![]() =
= ![]() ´
´![]() +
+ ![]() ´
´![]() . Tale semplice identità algebrica, che riassume in sé varie proprietà riguardanti la somma tra vettori e quella delle relative "proiezioni" (e che viene assunta, assieme ad altre pure "naturali", come "assioma", o proprietà caratteristica nella definizione "astratta" moderna di "prodotto scalare" generale in uno spazio vettoriale appunto generale, o astratto), consente di dimostrare immediatamente il teorema di Carnot. Infatti, con riferimento alla Fig. XIV.1 (caso del triangolo generico), si ha manifestamente
. Tale semplice identità algebrica, che riassume in sé varie proprietà riguardanti la somma tra vettori e quella delle relative "proiezioni" (e che viene assunta, assieme ad altre pure "naturali", come "assioma", o proprietà caratteristica nella definizione "astratta" moderna di "prodotto scalare" generale in uno spazio vettoriale appunto generale, o astratto), consente di dimostrare immediatamente il teorema di Carnot. Infatti, con riferimento alla Fig. XIV.1 (caso del triangolo generico), si ha manifestamente ![]() =
= ![]() +
+![]() ,
, ![]() =
=![]() -
-![]() d'onde:
d'onde:
![]() ´
´![]() = z2 = (
= z2 = (![]() -
-![]() )´(
)´(![]() -
-![]() ) = x2+y2-2
) = x2+y2-2![]() ´
´![]() = x2+y2-2xycos(a), come si voleva dimostrare.
= x2+y2-2xycos(a), come si voleva dimostrare.
Nota storica - "Questo famoso teorema, che costituisce una estensione del teorema di Pitagora ai triangoli non rettangoli, porta impropriamente il nome di Lazare Carnot (1753-1823), personaggio di spicco nel periodo della rivoluzione francese e del successivo impero di Napoleone, di cui fu dapprima nemico e successivamente apprezzato generale. Il teorema, seppure in altra forma, era già noto ad Euclide, che vi dedica le Proposizioni 12 e 13 del Libro II: la prima relativamente ai triangoli ottusangoli (in cui il quadrato costruito sul lato opposto all'angolo ottuso è maggiore della somma dei quadrati costruiti sugli altri due lati) e la seconda relativamente ai triangoli acutangoli (in cui invece il quadrato costruito su un lato è sempre minore della somma dei quadrati costruiti sugli altri due). Anche nella sua "forma trigonometrica" il teorema era noto molto prima di Carnot. Già usato dal matematico arabo-persiano al-Biruni (973-1048), si trova in Opera di Viète (1540-1603), che lo enuncia nella forma: 2xy : (x2+y2-z2) = 1 : sin(90°-a). Lazare Carnot lo riporta in De la corrélation des figures en géométrie, del 1800-01 (anno IX); in Géométrie de position (1803) stabilisce il teorema delle proiezioni, da cui poi ricava il teorema del coseno, nella forma oggi usata. Anche Bonaventura Cavalieri, in Trigonometria plana et sphaerica, linearis et Logarithmica del 1643, lo riporta, completo di dimostrazione."
(Da http://www.batmath.it/matematica/trigonometria/carnot/carnot.htm, una pagina dell'assai interessante sito: http://www.batmath.it, di Maddalena Falanga e Luciano Battaia, "un sito web per amanti della matematica e della fisica").
Passiamo adesso alle identità (XIV.2), che avremmo anche potuto scrivere come:
![]() =
= ![]() =
= ![]() = z ( poiché a =
= z ( poiché a = ![]() Þ sin(a) = 1 ) .
Þ sin(a) = 1 ) .
Esse si generalizzano a loro volta nel cosiddetto teorema dei seni (che viene detto di Eulero):
(XIV.4) ![]() =
= ![]() =
= ![]() .
.
Le identità (XIV.4) conseguono subito dall'osservazione che un prodotto del tipo xy*sin(a) uguaglia l'area P del parallelogramma corrispondente al "doppio" del triangolo in oggetto (semplice base per altezza relativa), sicché risulta ovviamente:
P = xy*sin(a) = yz*sin(g) = zx*sin(b) , che è un'altra forma che può assumere il teorema dei seni.
[Quanto precede si può interpretare (generalizzare) ancora assai convenientemente con l'algebra lineare, in connessione con il concetto di prodotto vettoriale (che corrisponde in fisica ai momenti). Con rimando ai simboli utilizzati nella precedente dimostrazione del teorema di Carnot, ricordiamo stavolta brevemente che, fissata ancora un'unità di misura nello spazio ordinario, si può definire un prodotto vettoriale (per cui usiamo il simbolo Ù) tra due vettori astratti non nulli ![]() ,
, ![]() mediante l'identità:
mediante l'identità: ![]() =
= ![]() *
*![]() *sin(q) , che stabilisce l'intensità del vettore prodotto, mentre direzione e verso sono specificati dicendo che si tratta di un vettore perpendicolare al piano contenente i fattori, tale che (
*sin(q) , che stabilisce l'intensità del vettore prodotto, mentre direzione e verso sono specificati dicendo che si tratta di un vettore perpendicolare al piano contenente i fattori, tale che (![]() ,
,![]() ,
,![]() ) sia una di quelle terne (basi dello spazio dei vettori dello spazio ordinario) che si dicono destre, "corrispondenti" cioè ordinatamente a pollice, indice e medio della mano destra (o anche indice, medio, pollice, etc.). Si tratta di questioni che richiedono un'adeguata discussione intorno a ciò che si dice l'orientamento dello spazio, ma per i nostri fini è sufficiente la formula relativa all'intensità di codesto prodotto vettoriale (un'operazione che viene poi estesa facilmente al caso di qualsiasi vettore; notiamo che, a differenza del prodotto scalare, essa dà come risultato un vettore, ed è anticommutativa, nel senso che:
) sia una di quelle terne (basi dello spazio dei vettori dello spazio ordinario) che si dicono destre, "corrispondenti" cioè ordinatamente a pollice, indice e medio della mano destra (o anche indice, medio, pollice, etc.). Si tratta di questioni che richiedono un'adeguata discussione intorno a ciò che si dice l'orientamento dello spazio, ma per i nostri fini è sufficiente la formula relativa all'intensità di codesto prodotto vettoriale (un'operazione che viene poi estesa facilmente al caso di qualsiasi vettore; notiamo che, a differenza del prodotto scalare, essa dà come risultato un vettore, ed è anticommutativa, nel senso che: ![]() = -
= -![]() (in particolare,
(in particolare, ![]() è sempre zero); però è ancora distributiva, e questo sarà ciò che per noi più conta). Procedendo come si era fatto nel caso del teorema di Carnot, la forma vettoriale del teorema dei seni è costituita dalla seguente catena di identità:
è sempre zero); però è ancora distributiva, e questo sarà ciò che per noi più conta). Procedendo come si era fatto nel caso del teorema di Carnot, la forma vettoriale del teorema dei seni è costituita dalla seguente catena di identità: ![]() Ù
Ù![]() =
= ![]() Ù(
Ù(![]() -
-![]() ) = -
) = -![]() Ù
Ù![]() =
= ![]() Ù
Ù![]() =
= ![]() Ù
Ù![]() = (procedendo analogamente) =
= (procedendo analogamente) =![]() Ù
Ù![]() . La forma "scalare" del teorema dei seni si ottiene ovviamente dalle precedenti identità vettoriali, passando ai moduli, altro nome per le intensità, dei relativi vettori. L'intensità di un prodotto vettore uguaglia proprio l'area del parallelogramma individuato dai fattori (area eventualmente nulla).]
. La forma "scalare" del teorema dei seni si ottiene ovviamente dalle precedenti identità vettoriali, passando ai moduli, altro nome per le intensità, dei relativi vettori. L'intensità di un prodotto vettore uguaglia proprio l'area del parallelogramma individuato dai fattori (area eventualmente nulla).]
Facciamo adesso un passo in avanti (quasi un balzo di secoli), introducendo la famosa formula di Eulero, che lega le funzioni circolari alla funzione esponenziale nel campo complesso (i rappresenta come al solito l'unità immaginaria, tale che i2 = -1):
(XIV.5) eiq = cos(q) + i*sin(q) .
Usando il simbolo q vogliamo rimandare implicitamente al fatto che si tratta della misura di un angolo, ovvero anche, più in generale, di un numero reale qualsiasi; la formula precedente vale naturalmente se in luogo di q si pone un qualsiasi numero complesso w, una volta che si siano estese anche le funzioni circolari, oltre all'esponenziale, dal dominio reale al dominio complesso.)
E' chiaro come da questa (dalla proprietà additiva degli esponenti di una potenza) si deducano senza fatica [La fatica cioè di una dimostrazione geometrica "sintetica", che viene assorbita dagli automatismi algoritmici dell'algebra.] le usuali formule di addizione e di sottrazione:
(XIV.6) ei(a+b) = cos(a+b) + isin(a+b) = eiaeib = [cos(a) + isin(a)]*[cos(b) + isin(b)] =
= [cos(a)cos(b) - sin(a)sin(b)] + i*[sin(a)cos(b) + cos(a)sin(b)] ,
d'onde:
cos(a+b) = cos(a)cos(b) - sin(a)sin(b) ; sin(a+b) = sin(a)cos(b) + cos(a)sin(b) .
E poi da queste le formule di duplicazione e di bisezione, per finire con le formule di prostaferesi:
(XIV.7) cos(2a) = cos2(a)- sin2(a) ; sin(2a) = 2sin(a)cos(a) ,
cos(a) = cos(2![]() ) = cos2(
) = cos2(![]() ) - sin2(
) - sin2(![]() ) = cos2(
) = cos2(![]() ) - 1 + cos2(
) - 1 + cos2(![]() ) = -1 + 2cos2(
) = -1 + 2cos2(![]() ) Þ
) Þ
cos2(![]() ) =
) = ![]() ,
,
e analogamente:
sin2(![]() ) =
) = ![]() ,
,
mentre dalle a = ![]() +
+ ![]() , b =
, b = ![]() -
- ![]() , si deduce:
, si deduce:
cos(a) = cos(![]() )*cos(
)*cos(![]() ) - sin(
) - sin(![]() )*sin(
)*sin(![]() )
)
cos(b) = cos(![]() )*cos(
)*cos(![]() ) + sin(
) + sin(![]() )*sin(
)*sin(![]() ) ,
) ,
da cui per somma:
cos(a) + cos(b) = 2cos(![]() )*cos(
)*cos(![]() ) ,
) ,
mentre analogamente:
sin(a) + sin(b) = 2sin(![]() )*cos(
)*cos(![]() ) .
) .
I precedenti elementi di trigonometria piana furono estesi al caso di una sfera, per le ovvie connessioni con l'astronomia (la volta celeste ci appare in effetti come una sfera; "Dei triangoli sferici" è il titolo del XIV capitolo del libro di Copernico, De revolutionibus orbium coelestium, 1543), la geodesia (la Terra è appunto, approssimativamente, una sfera - questa è, nonostante quello che alcuni continuano a credere, acquisizione antichissima, e mai sostanzialmente dimenticata - vedi il nostro citato Breve profilo storico...), e in seguito la navigazione (ibidem), tanto è vero che alla trigonometria sferica oggi non viene usualmente dedicato alcun cenno, né al liceo né all'università (corsi di studio in matematica e in fisica, se non specifici di astronomia), ma essa viene trattata negli Istituti Nautici, o all'Accademia Militare per futuri ufficiali di marina.
Detto R il raggio della sfera di cui trattasi (o meglio la lunghezza di tale raggio; non staremo a specificare pedantemente tale comunque importante differenza usando due simboli diversi), il teorema fondamentale della trigonometria sferica, che generalizza quello di Carnot, è:
(XIV.8) cos(![]() ) = cos(
) = cos(![]() )*cos(
)*cos(![]() ) + sin(
) + sin(![]() )*sin(
)*sin(![]() )*cos(a) (e analoghe),
)*cos(a) (e analoghe),
il quale sussiste evidentemente per triangoli sferici, vale a dire per quei "triangoli convessi contenuti da tre archi di circoli massimi in una superficie sferica" (abbiamo proposto esattamente la definizione che viene data da Copernico nell'opera sopra menzionata; oggi si parla anche di triangoli geodetici). Ne consegue in particolare che un triangolo sferico è sempre contenuto in una semisfera, e che per la misura dei suoi lati sussistono le disuguaglianze: 0 < x < ![]() = pR , e analoghe.
= pR , e analoghe.
Il teorema dei seni di Eulero in trigonometria sferica assume invece il seguente aspetto:
(XIV.9)  =
=  =
=  .
.
Naturalmente, nel caso di un triangolo rettangolo di "ipotenusa" z (a = 90° = ![]() ), la (XIV.8) si scrive come:
), la (XIV.8) si scrive come:
(XIV.10) cos(![]() ) = cos(
) = cos(![]() )*cos(
)*cos(![]() ) ,
) ,
che è la generalizzazione diretta del teorema di Pitagora [Si può ripetere qui l'osservazione che era stata fatta nella nota immediatamente successiva alla (XIV.3); la (XIV.8) ha come conseguenza naturale la circostanza che l'identità precedente (XIV.10) caratterizza esattamente i triangoli rettangoli, di ipotenusa z. Inoltre la (XIV.10) implica che, come in geometria euclidea, per l'uguaglianza di due triangoli rettangoli è sufficiente l'uguaglianza, ordinatamente, dell'ipotenusa e di un cateto, dovendo allora di necessità riuscire uguale anche l'altro cateto.], mentre le (XIV.9) diventano, sempre nel caso di un triangolo rettangolo:
(XIV.11) ![]() = sin(g)
= sin(g)![]() ;
; ![]() = sin(b)
= sin(b)![]() .
.
In vista dei futuri sviluppi, conviene anche dedurre una nuova identità dalle (XIV.8), (XIV.10) e (XIV.11), valida ancora quindi nel caso di un triangolo rettangolo:
cos(![]() ) = cos(
) = cos(![]() )*cos(
)*cos(![]() ) + sin(
) + sin(![]() )*sin(
)*sin(![]() )*cos(g) (dalla (XIV.8))
)*cos(g) (dalla (XIV.8))
cos(![]() ) = cos(
) = cos(![]() )*cos(
)*cos(![]() )*cos(
)*cos(![]() ) + sin(
) + sin(![]() )*sin(
)*sin(![]() )*cos(g) (sostituendo la (XIV.10) nell'identità precedente)
)*cos(g) (sostituendo la (XIV.10) nell'identità precedente)
cos(![]() ) = cos(
) = cos(![]() )*[1-sin2(
)*[1-sin2(![]() )] + sin(
)] + sin(![]() )*sin(
)*sin(![]() )*cos(g)
)*cos(g)
cos(![]() )*sin2(
)*sin2(![]() ) = sin(
) = sin(![]() )*sin(
)*sin(![]() )*cos(g)
)*cos(g)
cos(![]() )*sin(
)*sin(![]() ) = sin(
) = sin(![]() )*cos(g)
)*cos(g)
e da questa, dividendo membro a membro per cos(![]() ), e utilizzando ancora la (XIV.10):
), e utilizzando ancora la (XIV.10):
(XIV.12) tg(![]() ) = tg(
) = tg(![]() )*cos(g) ( simmetricamente: tg(
)*cos(g) ( simmetricamente: tg(![]() ) = tg(
) = tg(![]() )*cos(b) ).
)*cos(b) ).
E' forse interessante aggiungere qualche ulteriore osservazione in ordine alla trigonometria sferica, in connessione a quanto già visto sull'intervallo di variabilità della deficienza di un qualsiasi triangolo in geometria iperbolica: 0 < p - Sai <p . Nel caso sferico sarà invece:
Sai - p > 0 , mentre dal Theorema Elegantissimum di Gauss, che in questo caso si scrive:
Sai - p = K*(area del triangolo) = ![]() , si deduce subito: Sai - p <
, si deduce subito: Sai - p < ![]() = 2p , ovvero:
= 2p , ovvero:
Sai < 3p , perché, come abbiamo detto, un triangolo sferico si considera sempre contenuto in una semisfera. Ciò premesso, si comprende facilmente che un triangolo sferico può essere tanto birettangolo, quanto trirettangolo, ed è forse istruttivo mostrare come le formule precedenti ci possano guidare nell'individuazione di tutte queste nuove (rispetto alla geometria euclidea) figure. Dato un triangolo sferico birettangolo, dette z e x le sue "ipotenuse", risulta:
cos(![]() ) = cos(
) = cos(![]() )*cos(
)*cos(![]() )
)
cos(![]() ) = cos(
) = cos(![]() )*cos(
)*cos(![]() ) ,
) ,
d'onde:
cos(![]() ) = cos(
) = cos(![]() )*cos2(
)*cos2(![]() ) ,
) ,
e poiché non può essere cos2(![]() ) = 1 (
) = 1 (![]() non può essere p), si ha che, di necessità:
non può essere p), si ha che, di necessità:
cos(![]() ) = 0 = cos(
) = 0 = cos(![]() ) ,
) ,
ovvero: ![]() =
= ![]() =
= ![]() , sicché z = x =
, sicché z = x = ![]() =
= ![]() sono, come si poteva immaginare visualizzando la situazione, "quarti" di cerchio massimo, e y una parte (quasi arbitraria, da 0 a pR, estremi esclusi) di "equatore". Si noti che un'ulteriore peculiarità della geometria sferica è che un cateto può essere maggiore dell'ipotenusa.
sono, come si poteva immaginare visualizzando la situazione, "quarti" di cerchio massimo, e y una parte (quasi arbitraria, da 0 a pR, estremi esclusi) di "equatore". Si noti che un'ulteriore peculiarità della geometria sferica è che un cateto può essere maggiore dell'ipotenusa.
Il passaggio dalla trigonometria sferica a quella iperbolica può avvenire in un modo esclusivamente formale, che come abbiamo detto (Cap. IX) fu notato per il primo da Taurinus. La sua introduzione va preceduta da un esame delle relazioni inverse che si deducono dalla formula di Eulero (XIV.5) (che utilizzeremo nella sua forma generale). Scriviamo infatti:
eiw = cos(w) + i*sin(w)
e-iw = cos(-w) + i*sin(-w) = cos(w) - i*sin(w) ,
d'onde, per somma e differenza:
(XIV.13) 2cos(w) = eiw + e-iw ; 2i*sin(w) = eiw - e-iw .
Introdotte allora le funzioni iperboliche:
(XIV.14) cosh(w) = ![]() , sinh(w) =
, sinh(w) = ![]() , tgh(w) =
, tgh(w) = ![]() =
= ![]()
(per una qualsiasi variabile reale o complessa w),
le identità (XIV.13) si esprimono sinteticamente come:
(XIV.15) cos(w) = cosh(iw) ; sin(w) = -i*sinh(iw) ; tg(w) = -i*tgh(iw) ,
oppure anche:
(XIV.15') cos(iw) = cosh(i2*w) = cosh(-w) = cosh(w) ; sin(iw) = -i*sinh(-w) = i*sinh(w) ;
tg(iw) = i*tgh(w) ,
le quali tutte giustificano la denominazione assegnata alle funzioni in parola, assieme alla circostanza che sussiste l'identità:
(XIV.16) cosh2(w) - sinh2(w) = 1 .
[La (XIV.16) dimostra infatti che le funzioni iperboliche possono essere utilizzate per parametrizzare i rami dell'iperbole equilatera x2 - y2 = 1 , allo stesso modo che quelle circolari possono essere utilizzate nel medesimo ruolo, in relazione però alla circonferenza x2 + y2 = 1 .]
[Le funzioni ellittiche sono tutt'altra, e assai più difficile, cosa! Vedi per esempio il testo di Giacomo Bellacchi, Introduzione storica alla teoria delle funzioni ellittiche, Barbera, Firenze, 1894, che è disponibile in rete nell'utilissimo sito di monografie matematiche della Cornell University: http://historical.library.cornell.edu/math/math_B.html .]
Riportiamo i grafici di queste tre importanti funzioni (tratti da un altro interessante sito:
http://spazioinwind.libero.it/corradobrogi/I-indice.htm,
dedicato a: "La Matematica, La Geometria, L'Analisi per chi voglia ripartire da zero"):
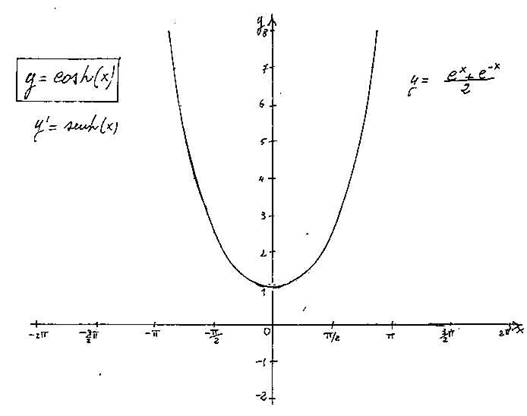
(Fig. XIV.5)
(Il coseno iperbolico)
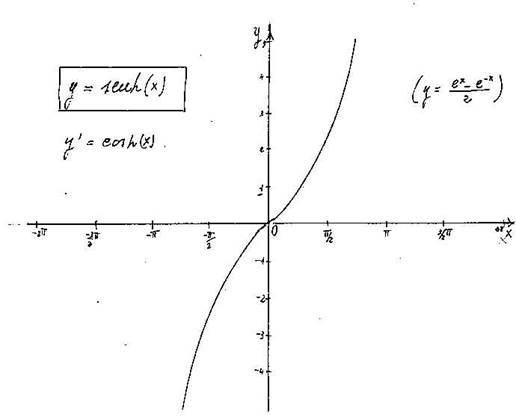
(Fig. XIV.6)
(Il seno iperbolico)

(Fig. XIV.7)
(La tangente iperbolica)
Ciò premesso, ritorniamo alle (XIV.8), (XIV.9), e (XIV.12) della trigonometria sferica, osservando che se la geometria iperbolica deve riferirsi a una superficie di curvatura costante negativa K = -![]() , si può allora presumere che le dette identità continuino a sussistere mediante la semplice sostituzione della costante R con la costante iR, sostituzione che ha l'effetto appunto di tramutare la curvatura della sfera, K =
, si può allora presumere che le dette identità continuino a sussistere mediante la semplice sostituzione della costante R con la costante iR, sostituzione che ha l'effetto appunto di tramutare la curvatura della sfera, K = ![]() , nella sua opposta, appunto la curvatura negativa che abbiamo nei capitoli precedenti spesso incontrato:
, nella sua opposta, appunto la curvatura negativa che abbiamo nei capitoli precedenti spesso incontrato:
K = ![]() = -
= -![]() .
.
[Non che questa osservazione risolva completamente i problemi legati all'introduzione della trigonometria in un piano iperbolico, visto che bisogna cominciare almeno a definirvi, in modo "opportuno", le funzioni circolari degli angoli, e la cosa è meno semplice di quanto potrebbe pensarsi - vedi quanto se ne è detto parzialmente nel capitolo XII.]
Ecco allora che la (XIV.8) diventa:
cos(![]() ) = cos(
) = cos(![]() )*cos(
)*cos(![]() ) + sin(
) + sin(![]() )*sin(
)*sin(![]() )*cos(a) ,
)*cos(a) ,
ovvero:
cos(-i![]() ) = cos(-i
) = cos(-i![]() )*cos(-i
)*cos(-i![]() ) + sin(-i
) + sin(-i![]() )*sin(-i
)*sin(-i![]() )*cos(a)
)*cos(a)
cos(i![]() ) = cos(i
) = cos(i![]() )*cos(i
)*cos(i![]() ) + sin(i
) + sin(i![]() )*sin(i
)*sin(i![]() )*cos(a) ,
)*cos(a) ,
e questa diventa infine, tramite le (XIV.15'):
(XIV.17) cosh(![]() ) = cosh(
) = cosh(![]() )*cosh(
)*cosh(![]() ) - sinh(
) - sinh(![]() )*sinh(
)*sinh(![]() )*cos(a)
)*cos(a)
(e analoghe - il segno meno proviene dal fattore i al quadrato).
Naturalmente, il teorema di Pitagora iperbolico è espresso dalla:
(XIV.17') cosh(![]() ) = cosh(
) = cosh(![]() )*cosh(
)*cosh(![]() ) .
) .
[Si può ripetere qui l'osservazione, già fatta per la geometria euclidea e per quella sferica, che l'identità precedente (XIV.17') caratterizza esattamente i triangoli rettangoli, di ipotenusa z. Inoltre, che la (XIV.17') implica ancora che, in geometria iperbolica, per l'uguaglianza di due triangoli rettangoli è sufficiente l'uguaglianza, ordinatamente, dell'ipotenusa e di un cateto. Si osservi infine che sempre la stessa identità implica: z > x, y , come si vede facilmente tenuto conto del grafico della funzione coseno iperbolico nel campo reale; in altre parole, che la geometria iperbolica, a differenza di quella sferica, assomiglia a quella euclidea almeno per la proprietà che l'ipotenusa è sempre maggiore dei cateti (che è peraltro quanto asserito da quello che abbiamo chiamato "postulato di contrazione", vedi il Cap. VI).]
Alle (XIV.17) possiamo associare poi le formule corrispondenti alle (XIV.9):
(XIV.18)  =
=  =
=  ,
,
e alle (XIV.12) ( tramite la tg(iq) = -i*tgh(q) ):
(XIV.19) tg(-i![]() ) = tg(-i
) = tg(-i![]() )*cos(g) Þ tgh(
)*cos(g) Þ tgh(![]() ) =tgh(
) =tgh(![]() )*cos(g)
)*cos(g)
( simmetricamente: tgh(![]() ) = tgh(
) = tgh(![]() )*cos(b) ) .
)*cos(b) ) .
Le (XIV.19) mostrano chiaramente perché in geometria iperbolica si verifica quello strano fatto già notato da Saccheri, e da noi assunto come motivo chiave nel Cap. X. Data infatti la tgh(![]() ) = tgh(
) = tgh(![]() )*cos(b), e interpretando x come proiezione di z, ecco che per esempio la proiezione di un segmento "doppio" di un segmento assegnato non coincide affatto con il doppio della proiezione del segmento dato, proprio perché, pur rimanendo invariato l'angolo di proiezione, e quindi il termine cos(b), il numero reale tgh(
)*cos(b), e interpretando x come proiezione di z, ecco che per esempio la proiezione di un segmento "doppio" di un segmento assegnato non coincide affatto con il doppio della proiezione del segmento dato, proprio perché, pur rimanendo invariato l'angolo di proiezione, e quindi il termine cos(b), il numero reale tgh(![]() )*cos(b) non è affatto 2tgh(
)*cos(b) non è affatto 2tgh(![]() )*cos(b), bensì risulta di esso minore, in quanto: tgh(
)*cos(b), bensì risulta di esso minore, in quanto: tgh(![]() ) < 2tgh(
) < 2tgh(![]() ), per ogni numero reale positivo z. Stabilire l'ultima disuguaglianza è sostanzialmente un'altra dimostrazione del citato asserto di Saccheri. In effetti (ponendo R=1) risulta:
), per ogni numero reale positivo z. Stabilire l'ultima disuguaglianza è sostanzialmente un'altra dimostrazione del citato asserto di Saccheri. In effetti (ponendo R=1) risulta:
![]() =
= ![]() < 2
< 2![]() ,
,
poiché:
(e2z+1)2 < 2(e4z+1) ,
come dire:
2e2z < e4z+1 ,
ovvero:
e4z+1-2e2z = (e2z-1)2 > 0 .
Fonte: http://www.cartesio-episteme.net/mat/ne14.doc
Sito web da visitare: http://www.cartesio-episteme.net
Autore del testo: non indicato nel documento di origine
Il testo è di proprietà dei rispettivi autori che ringraziamo per l'opportunità che ci danno di far conoscere gratuitamente i loro testi per finalità illustrative e didattiche. Se siete gli autori del testo e siete interessati a richiedere la rimozione del testo o l'inserimento di altre informazioni inviateci un e-mail dopo le opportune verifiche soddisferemo la vostra richiesta nel più breve tempo possibile.
I riassunti , gli appunti i testi contenuti nel nostro sito sono messi a disposizione gratuitamente con finalità illustrative didattiche, scientifiche, a carattere sociale, civile e culturale a tutti i possibili interessati secondo il concetto del fair use e con l' obiettivo del rispetto della direttiva europea 2001/29/CE e dell' art. 70 della legge 633/1941 sul diritto d'autore
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
"Ciò che sappiamo è una goccia, ciò che ignoriamo un oceano!" Isaac Newton. Essendo impossibile tenere a mente l'enorme quantità di informazioni, l'importante è sapere dove ritrovare l'informazione quando questa serve. U. Eco
www.riassuntini.com dove ritrovare l'informazione quando questa serve