I riassunti , gli appunti i testi contenuti nel nostro sito sono messi a disposizione gratuitamente con finalità illustrative didattiche, scientifiche, a carattere sociale, civile e culturale a tutti i possibili interessati secondo il concetto del fair use e con l' obiettivo del rispetto della direttiva europea 2001/29/CE e dell' art. 70 della legge 633/1941 sul diritto d'autore
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
Gli encoder ottici sono trasduttori di spostamento relativo sia lineare che angolare. Hanno un largo impiego che va dalle macchine utensili ai robot industriali. Si distinguono per la quantizzazione del campo di lavoro e la conseguente uscita digitale. Grazie a tale caratteristica, nel caso di unità di acquisizione od elaborazione digitale, non è necessario interporre convertitori A/D ma è possibile interfacciare direttamente lo strumento all’unità di governo. In fase di trasmissione del segnale si ha una minore sensibilità ai disturbi interferenti. Da contro la risoluzione risulta limitata.
Una trattazione completa delle possibili realizzazioni richiederebbe la descrizione di numerose tipologie di encoder: a contatti striscianti, ottici a diffrazione, a riflessione, laser, magnetici, elettromagnetici, etc. In questa breve nota si è presa a riferimento la categoria degli encoder ottici incrementali a luce trasmessa.
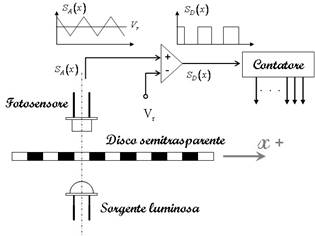
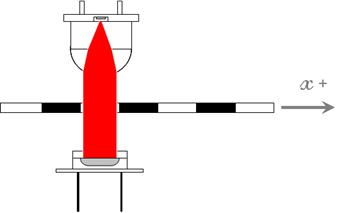
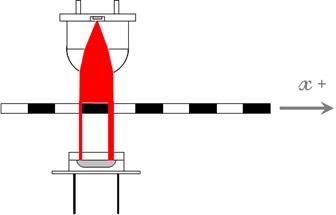
Il principio su cui si basano è la trasmissione di energia luminosa tra una sorgente (diodo emettitore) ed un fotosensore di ricezione (fotodiodo o fototransistor), che risulta funzione del moto relativo tra la coppia sorgente-ricevitore ed un corpo interposto, detto maschera mobile, caratterizzato da settori opachi accanto a settori trasparenti (figura 1a ed 1b). Il segnale raccolto dai fotosensori e trasdotto in differenza di potenziale elettrica viene fornito in ingresso ad un circuito comparatore che presenta in uscita un segnale logico alto se il segnale del fotosensore è maggiore della soglia Vr , basso nel caso opposto. Le transizioni del segnale digitale in uscita dal comparatore possono essere contate da un opportuno circuito logico (contatore) che fornisce un numero digitale proporzionale alle transizioni chiaro-scuro della maschera e quindi allo spostamento relativo tra la coppia sorgente–ricevitore e la maschera stessa.
Lo spostamento viene rilevato per via incrementale rispetto ad una posizione di riferimento interno (il canale di zero) od esterno (un interruttore meccanico). Tale configurazione viene adottata nella maggioranza dei robot industriali che, in fase di accensione, eseguono un ciclo di movimentazione per ciascun braccio allo scopo di azzerare uno ad uno gli encoder di cui dispongono.
|
|
(a) |
(b)
|
|
|
(c) |
(d) |
Fig. 1 - (a): principio di funzionamento e schema dell’elettronica di prossimità; (b): disco codificato per encoder di tipo rotativo; (c, d): come appare lo strumento nella versione rotazionale e lineare.
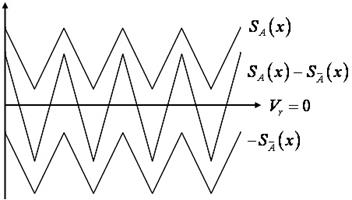
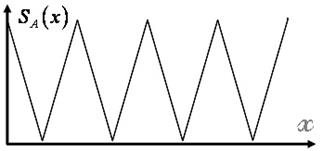
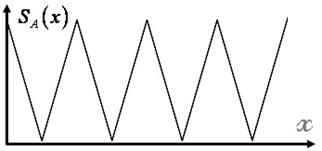
L’uscita del fotosensore in base al moto relativo è una funzione periodica di forma variabile tra una armonica pura ed una funzione a dente di sega con valore minimo maggiore di zero. Il massimo corrisponde all’allineamento della coppia sorgente-ricevitore con il settore trasparente, il minimo con quello opaco. La maschera, in corrispondenza del settore opaco, non impedisce a tutta l’energia luminosa di raggiungere il fotosensore a causa di riflessioni interne allo strumento, tantomeno di annullare il bias del fotosensore o dell’elettronica di condizionamento.
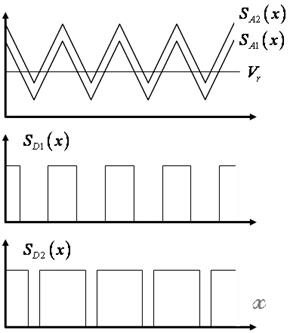
Fig. 2 In alto il segnale del fotodiodo e la soglia di comparazione; in basso due risultati dell’operazione di sogliatura. Il risultato dipende dal livello medio.
Nella realizzazione pratica lo schema di principio mostrato in figura 1a è soggetto ad alcune modifiche. Tale schema, se direttamente implementato, evidenzierebbe i seguenti limiti:
Di seguito vengono analizzate le soluzioni adottate in riferimento ad ognuno dei punti sopraelencati.
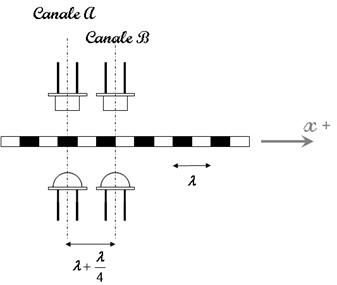
Per riconoscere il verso di rotazione vengono poste due coppie sorgente–ricevitore sfasate di l/4 ovvero 90°, comunemente identificate come canale A e canale B. Rilevando la fase tra i due canali si riconosce il verso del moto. In figura 3b vengono mostrate le sequenze di uscita delle due coppie in caso di moto in verso positivo e negativo. Se il canale B risulta essere in ritardo il moto è positivo, viceversa se in anticipo.
|
|
(a) |
(b) |
Fig. 3 - (a, b): disposizione ed uscita di due coppie sorgente–ricevitore poste a l/4 (più un multiplo di l, non influente).
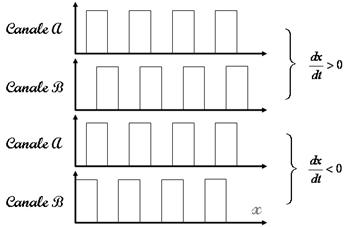
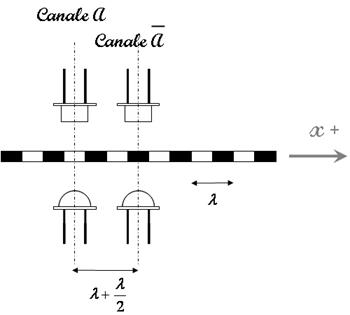
Diversi effetti di disturbo quali temperatura, polvere e deposizioni accumulate all’interno dello strumento, invecchiamento, dose di radiazioni subita, disallineamento meccanici, etc., provocano variazione di potenza emessa dalle sorgenti luminose, di potenza raccolta e di sensibilità dei fotoricevitori. Tali effetti producono una variazione del livello medio del segnale e quindi del duty-cycle (figura 2). Per compensare il fenomeno è possibile porre due coppie di sensori ad una distanza di l/2 a cui è possibile aggiungere un numero intero di cicli, non influente, necessario ad accomodare gli ingombri dei componenti.
Allo scopo di evidenziare il principio di compensazione modelliamo le due uscite mediante due sinusoidi  funzioni del moto relativo x :
funzioni del moto relativo x :
Da cui, calcolando la differenza:

In considerazione del fatto che sia le sorgenti che i fotosensori appartengono allo stesso lotto di produzione, e quindi verosimilmente hanno subito lo stesso invecchiamento e sono stati sottoposti alle medesime condizioni ambientali, i segnali avranno livelli comparabili in termini di ampiezza e valor medio, per cui:

Dall’equazione appena ricavata si evincono due considerazioni:
|
|
(a) |
(b) |
Fig. 4 - (a, b): disposizione ed uscita di due coppie di fotodiodi posti a l/2 (più l).
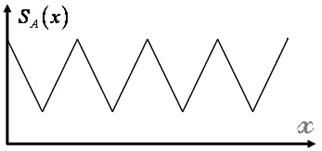
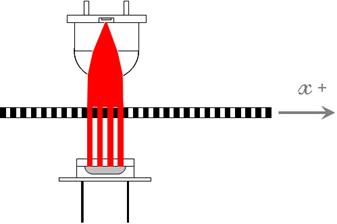
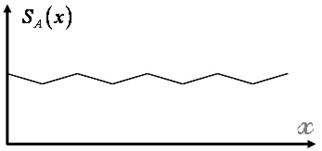
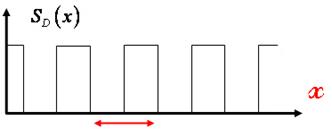
Il terzo limite è rappresentato dalla dimensione del raggio emesso dalla sorgente luminosa in rapporto alla dimensione delle fenditure. Per aumentare la risoluzione si potrebbe pensare di diminuire la dimensione delle fenditure a piacimento. Tuttavia, quando la dimensione delle fenditure è inferiore alla larghezza della superficie di raccolta del fotosensore, tanto maggiore sarà il loro numero, tanto minore sarà la variazione di energia rilevata (figura 5).
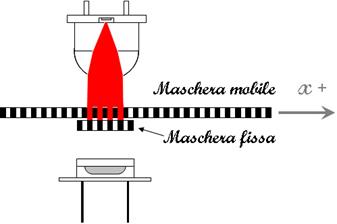
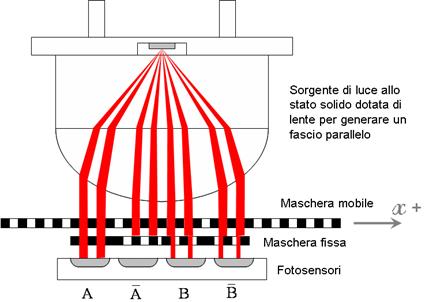
Una soluzione che può essere adottata è la riduzione della superficie degli elementi sensibili. Tale soluzione viene effettivamente praticata nel caso di risoluzioni non inferiori a circa 0.1 mm accoppiando ad esempio i fotosensori con sorgenti laser. Tuttavia, per risoluzioni minori, una ulteriore riduzione della superficie di raccolta provocherebbe una diminuzione del segnale e quindi del rapporto segnale rumore, prima della operazione di sogliatura. Per ovviare a tale inconveniente si inserisce tra maschera mobile e fotosensore una maschera fissa (figura 6). Quando le due maschere sono allineate si ha passaggio di luce. Quando sono sfasate di l/2 non si ha passaggio di luce verso il ricevitore, purché tutti i raggi dell’emettitore siano paralleli o la distanza tra le maschere sia nulla.
In questo modo si ottiene il duplice vantaggio di spostare dai fotosensori alle fenditure il requisito di accurato posizionamento e di aumentare l’energia luminosa raccolta potendo impiegare fotoricevitori a superficie relativamente ampia. Il primo vantaggio è particolarmente significativo se si considera che i componenti sono collocati su vetronite, nel caso di circuiti stampati, o su silicio, nel caso di circuiti integrati. In questo modo sarebbe difficile garantirne la precisione e la stabilità in funzione della temperatura. Ricavando entrambe le maschere, la mobile e la fissa, su supporto in vetro mediante fotoincisione, è possibile garantire ottima stabilità ed accuratezza.
|
|
|
|
|
|
(a) |
(b) |
Fig. 5 - (a) schemi di principio; (b) segnali dei fotosensori al variare della risoluzione.
|
|
(a) |
(b) |
Fig. 6 Disposizione della maschera di fronte al fotodiodo e segnale corrispondente.
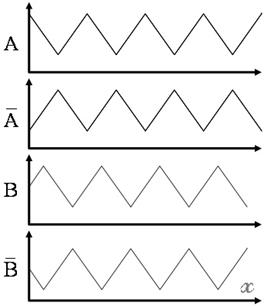
Mettendo assieme gli accorgimenti visti nei tre paragrafi precedenti si perviene ad uno schema più vicino alla realizzazione pratica (figura 7). Vengono impiegati quattro fotosensori ricavati nel supporto di un medesimo integrato. La fase relativa tra i segnali  viene regolata tramite la griglia della maschera fissa.
viene regolata tramite la griglia della maschera fissa.
|
|
(a) |
(b) |
Fig. 7 - (a): schema di assemblaggio dei quattro fotosensori che generano i due segnali in quadratura A e B; (b): segnali analogici di partenza.
Una tecnica impiega l’OR-esclusivo (XOR) tra i canali A e B. L’uscita è alta quando solo uno dei due ingressi è al valore logico alto. Ad esempio mediante una rete RC l’uscita viene ancora ritardata e fornita in ingresso ad un secondo XOR (figura 8). Il risultato è di aver incrementato di quattro volte il numero di transizioni basso-alto in un periodo spaziale pari a l, e quindi quattro volte la risoluzione.
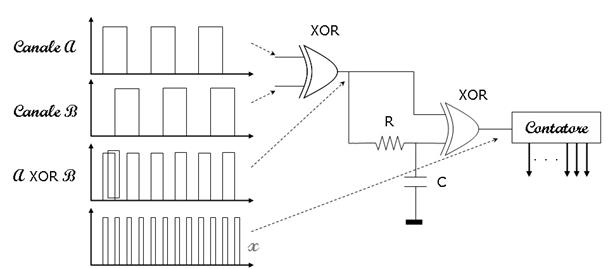
Fig. 8 Tecnica di elaborazione digitale del segnale di due fotodiodi sfasati di l/4 per moltiplicare di 4 volte la risoluzione.
Per incrementare ulteriormente la risoluzione è necessario ricorrere ai circuiti interpolatori che impiegano direttamente i segnali analogici provenienti dai fotoricevitori.
Alcune delle prime versioni di circuiti interpolatori erano basate su reti di resistenze che realizzano differenti livelli di comparazione cui sottoporre il segnale analogico in modo da imporre transizioni di livello ad ogni variazione pari alla soglia di risoluzione.
Moderne tecniche di interpolazione impiegano sistemi come quelli schematizzati in figura 9. I segnali analogici, nel caso di risoluzioni grossolane, assomigliano a segnali triangolari come quelli schematizzati nelle figure precedenti. Nel caso di risoluzioni fini divengono pressoché sinusoidali. In questo ultimo caso i segnali dei canali A e B in quadratura tra loro (sfasati di 90°) vengono impiegati per ottenere direttamente l’angolo tramite operazione di arco-tangente od arco-cotangente a seconda che il livello del segnale A sia maggiore o minore di quello B. Quando l’inversa dell’operatore tangente è vicina alla singolarità si impiega la cotangente e viceversa.
Tali tecniche di incremento della risoluzione funzionano bene a patto che siano rispettate le seguenti condizioni:
A causa della non perfetta collimazione dei raggi luminosi provenienti dalla sorgente, la distanza tra maschera mobile e maschera fissa dovrebbe essere minima per avere la massima efficacia (figure 6, 7). A causa delle condizioni ambientali, in particolare della temperatura, delle condizioni di carico trasmesso dal giunto di accoppiamento alla struttura meccanica (§1.6), si genera un movimento relativo tra le maschere che ne vincola la minima distanza di sicurezza (per condizioni standard dell’ordine di 0.1 mm). Tale distanza, assieme alla non perfetta collimazione del fascio luminoso (raggi non perfettamente paralleli), provoca una più o meno evidente differenza tra segnali analogici reali ed ipotizzati. Per tali motivi si pre-elaborano i due segnali in modo da compensare deviazioni di ampiezza, fase e valor medio. Tali operazioni sono effettuate a livello digitale e quindi precedute da una operazione di conversione analogico/digitale.
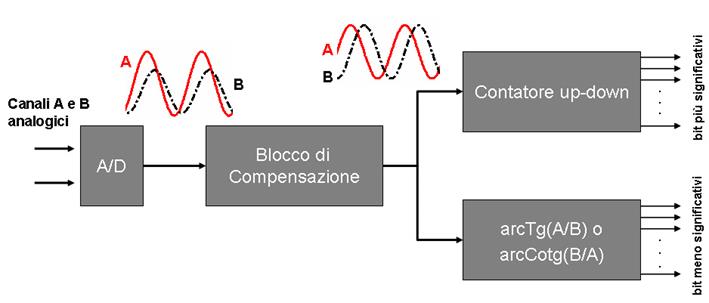
Fig. 9 - Schema logico di un sistema di interpolazione per l’incremento della risoluzione.
La compensazione sarà certamente affetta da incertezze. L’ipotesi di bassa distorsione potrebbe avere una validità molto limitata ed essere di difficile correzione. Ne consegue che, mentre la risoluzione dell’encoder può essere incrementata anche di tre ordini di grandezza, l’accuratezza dello strumento difficilmente potrà essere inferiore ad un decimo del passo della griglia.
Sarebbe lecito chiedersi quale sia la ragione del largo impiego di tali sistemi interpolatori. L’utilità deriva principalmente da esigenze di tipo controllistico infatti, dal punto di vista di un sistema di controllo, può risultare conveniente avere uno strumento con elevata risoluzione anche se dotato di bassa accuratezza. Per chiarire tale concetto si prenda ad esempio ad un robot che mantiene un carico nella postura di figura 10a.
|
|
(a) |
(b) |
Fig. 10 Fenomeno del digital jitter. (a): foto di un manipolatore che sorregge un carico; (b): segnale encoder di spalla (asse di rotazione indicato nella foto) in funzione dello spostamento verticale del carico.
Se la coppia applicata al giunto risulta appena inferiore a quella necessaria per tenerlo in equilibrio contro la gravità, il braccio si piegherà lentamente, mentre la scheda di controllo assi non rileverà alcun moto fino a che la rotazione non avrà superato la soglia della risoluzione dell’encoder. A questo punto la scheda, tramite il segnale di controreazione, farà in modo di riportare il braccio sul valore di riferimento, ma non avrà la capacità di stabilire l’esatta quantità di corrente da fornire per rimanere in equilibrio essendo l'encoder sprovvisto di riferimenti tra una tacca e l’altra. La forza stabilita sarà quindi di poco inferiore o di poco superiore a quella necessaria ed il ciclo si ripeterà dando vita all’instaurarsi di piccole oscillazioni, fenomeno denominato digital jitter. Esso si manifesta anche per altri sistemi in controreazione basati su sensori di tipo digitale, e può essere ridotto incrementando la risoluzione mediante l’impiego dei sistemi di interpolazione.
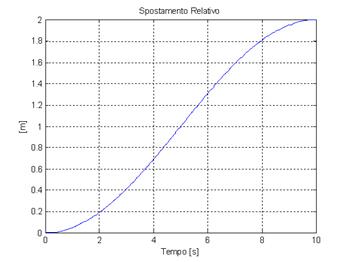
I segnali degli encoder incrementali sono di natura digitale per cui non è possibile applicare direttamente l’operazione di derivazione per ottenere la velocità dal segnale di spostamento. Per analizzare le problematiche e gli accorgimenti da attuare per la stima di velocità tramite encoder incrementali con canali in quadratura, si supponga di voler misurare un moto relativo descritto da:

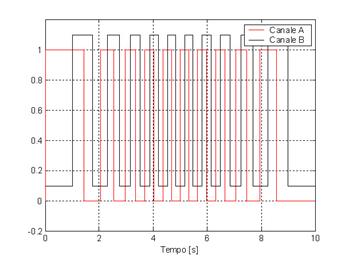
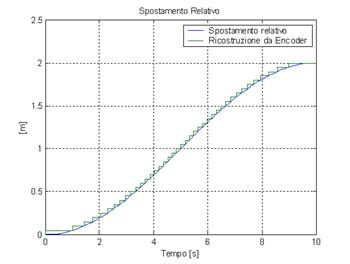
nel periodo di tempo 0-10 secondi e di avere a disposizione un encoder di risoliuzione 0.2. A titolo di esempio non sono rilevanti le unità di misura. In figura 11 sono riportati lo spostamento ed i segnali encoder corrispondenti. In figura 12a sono rappresentati lo spostamento relativo e la ricostruzione ottenibile da encoder. Appare evidente come sia impossibile applicare direttamente l’operazione di derivata per stimare la velocità relativa.
|
|
(a) |
(b) |
Fig. 11 Spostamento relativo (a) misurato tramite encoder a due canali in quadratura (b).
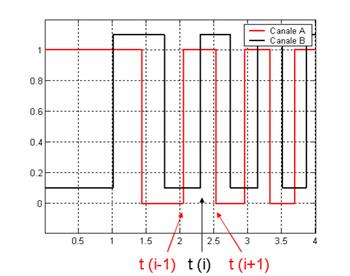
Una metodo utilizzabile per stimare la velocità è quello di considerare i fronti di discesa e salita di entrambi i canali, basandosi sul fatto che sono distanziati teoricamente di una quantità pari a l/4 (figura 13a):
L’assegnazione temporale del campione viene fatta all’istante  , media dei due istanti di transizione considerati. Il segnale di velocità risultante è a campionamento variabile. È comunque possibile riportare ad un campionamento regolare mediante interpolazione.
, media dei due istanti di transizione considerati. Il segnale di velocità risultante è a campionamento variabile. È comunque possibile riportare ad un campionamento regolare mediante interpolazione.
Per stimare velocità e spostamento è sufficiente registrare le transizioni di livello. Pertanto, dal punto di vista dell’impiego di sistemi di acquisizione del segnale, non è necessario utilizzare convertitori A/D, ma è sufficiente impiegare contatori digitali sia per contare i fronti di salita e discesa allo scopo di stimare lo spostamento, sia per registrare gli istanti di transizione e quindi desumere la velocità.
|
|
(a) |
(b) |
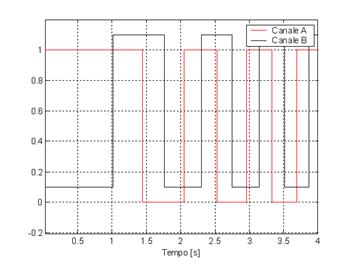
Fig. 12 Spostamento relativo originario e ricostruito tramite encoder (a) zoom sui segnali encoder (b).
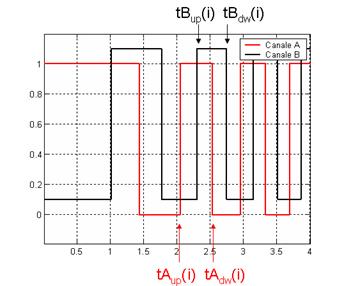
|
|
Fig. 13 (a): istanti di transizione considerando tutti i fronti; (b): istanti di transizione corrispondenti.
Mediante la relazione appena introdotta, si ottiene una buona accuratezza solo nel caso in cui le condizioni siano ideali, ovvero:
- la fase tra i canali sia esattamente 90°;
- il duty-cycle di entrambi sia 50%.
Come già discusso, tale situazione difficilmente si verifica nella realtà.
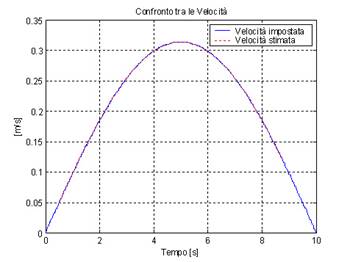
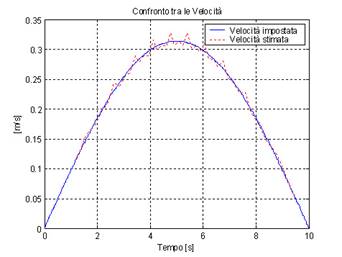
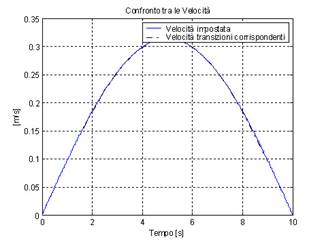
Il risultato della stima di velocità mediante il metodo che considera tutte le transizioni in sequenza è illustrato in figura 14, sia nel caso ideale (90° sfasamento e 50% duty-cycle per entrambi i canali), che nel caso in cui la fase sia 88°, il valor medio del canale A analogico sia pari a 0.02 V (2 % dell’ampiezza), il valor medio del canale B analogico sia pari a -0.02 V (-2 % dell’ampiezza).
|
|
(a) |
(b) |
Fig. 14 (a): velocità stimata considerando tutte le transizioni in sequenza nel caso ideale: 90° sfasamento e 50% duty-cycle per entrambi i canali; (b): velocità stimata nel caso in cui la fase è pari a 88°, il valor medio del canale A analogico sia pari a 0.02 V (2 % dell’ampiezza), il valor medio del canale B analogico sia pari a -0.02 V (-2 % dell’ampiezza).
Dalla figura 14b risulta evidente come piccoli scostamenti dalle condizioni ideali provochino evidenti deviazioni da una stima corretta di velocità. Per encoder ad alta risoluzione le deviazioni prese ad esempio nella figura 14 sono affatto conservative.
Per ovviare al problema dello sfasamento e della stabilità del duty-cycle che risultano tanto più critici quanto maggiore è la risoluzione dell’encoder, è sufficiente considerare le transizioni corrispondenti (figura 13b): salita-salita canale A, discesa-discesa canale A, salita-salita canale B e discesa-discesa canale B. Le transizioni corrispondenti rimangono coerenti con se stesse anche in presenza di forti ingressi di disturbo.
|
|
(a) |
(b) |
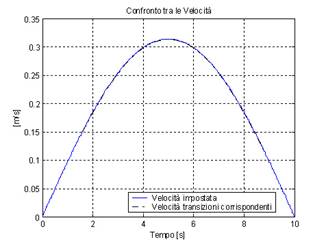
Fig. 15 (a): velocità stimata considerando le transizioni corrispondenti nel caso in cui la fase è pari a 88°, il valor medio del canale A analogico sia pari a 0.02 V (2 % dell’ampiezza), il valor medio del canale B analogico sia pari a -0.02 V (-2 % dell’ampiezza), corrisponde al caso della figura 14b; (b): caso in cui la fase è pari a 60°, il valor medio del canale A analogico è pari a 0.2 V (20 % dell’ampiezza), il valor medio del canale B analogico è pari a -0.3 V (-30 % dell’ampiezza).
Si perviene al seguente algoritmo di stima della velocità:

In figura 15 risulta evidente il miglioramento. La stima risulta stabile anche per grosse deviazioni di fase e duty-cycle (figura 15b).
L’allineamento e la distanza tra maschera mobile e maschera fissa risultano di fondamentale importanza per il corretto funzionamento dello strumento. Particolare cura deve essere quindi prestata nell’operazione di assemblaggio dello strumento con la struttura cui va applicato. Nel caso di encoder angolare il principio da adottare è quello di vincolare l’albero motore all’encoder mediante un sistema che trasmetta il solo moto angolare, ovvero la coppia nella direzione dell’asse ma non sul piano del disco evitando dunque di flettere l’albero di trasmissione. In figura 16 sono riportati alcuni sistemi di vincolo per encoder ottici angolari sia nella configurazione classica che ad albero cavo. È da notare che il moto trasmesso da un giunto flessibile come quelli mostrati in figura 16b non risulta omocinetico. Tuttavia la soluzione risulta più compatta rispetto ad un doppio giunto di Holdan.
Per quanto riguarda gli encoder lineari essi sono generalmente composti da una riga ottica, solitamente fissa, e da un cursore composto da emettitore e ricevitore con relativa maschera. Le soluzioni di vincolo variano a seconda della configurazione in accordo con i principi discussi.
|
|
(a) |
(b) |
Fig. 16 (a): encoder ad albero cavo con aletta di fissaggio che vincola la rotazione della carcassa ma ne lascia parzialmente libera la flessione; (b): giunti flessibili.
Fonte: http://www.miro.ing.unitn.it/download/Didactics/Misure1/MAteriale%20del%20Corso/5%20Encoders/dispensa/Nota%20Encoder.doc
Sito web da visitare: http://www.miro.ing.unitn.it/
Autore del testo: M. De Cecco
Il testo è di proprietà dei rispettivi autori che ringraziamo per l'opportunità che ci danno di far conoscere gratuitamente i loro testi per finalità illustrative e didattiche. Se siete gli autori del testo e siete interessati a richiedere la rimozione del testo o l'inserimento di altre informazioni inviateci un e-mail dopo le opportune verifiche soddisferemo la vostra richiesta nel più breve tempo possibile.
I riassunti , gli appunti i testi contenuti nel nostro sito sono messi a disposizione gratuitamente con finalità illustrative didattiche, scientifiche, a carattere sociale, civile e culturale a tutti i possibili interessati secondo il concetto del fair use e con l' obiettivo del rispetto della direttiva europea 2001/29/CE e dell' art. 70 della legge 633/1941 sul diritto d'autore
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
"Ciò che sappiamo è una goccia, ciò che ignoriamo un oceano!" Isaac Newton. Essendo impossibile tenere a mente l'enorme quantità di informazioni, l'importante è sapere dove ritrovare l'informazione quando questa serve. U. Eco
www.riassuntini.com dove ritrovare l'informazione quando questa serve